

Master-slave type electromechanical servo cooperative motion control system
A technology of servo control and coordinated motion, applied in control systems, vector control systems, motor generator control, etc., can solve the problems of large specific power and load requirements, low dynamic performance indicators, etc., and achieve high power-to-mass ratio and low product cost Moderate, compact space layout effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] Below in conjunction with accompanying drawing and specific embodiment the present invention is described in further detail:
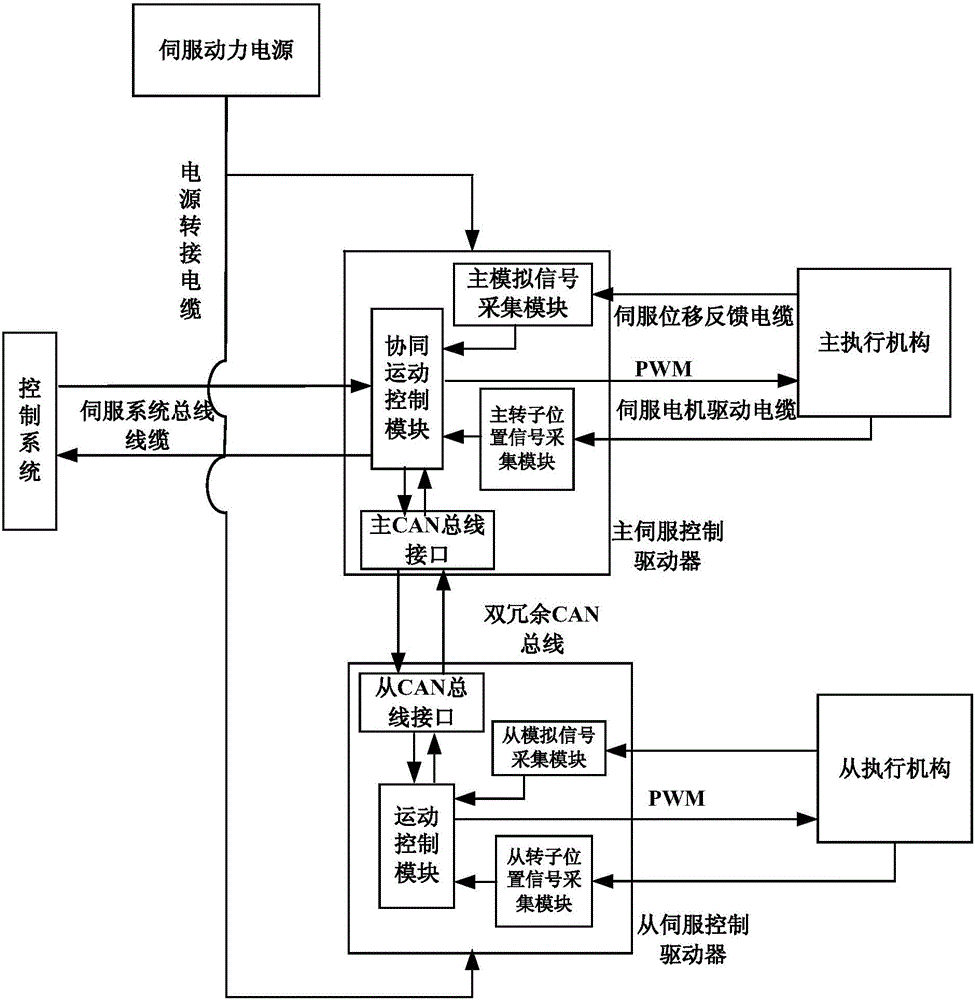
[0032] The main task of the main servo control driver is to receive all kinds of instructions issued by the control system, generate an interrupt after receiving the bus message of the control system and enter the interrupt service program, and perform various operations required by the bus protocol; and communicate through the dual redundant CAN bus Query whether a new CAN message is received in the timer interrupt service program, and receive the running status of the slave servo control driver and the slave actuator in real time. According to the required nozzle swing angle, calculate the expansion and contraction lengths corresponding to the master and slave actuators in real time, and adjust the acceleration factor and jerk factor of the master and slave motion trajectories in real time to realize the master and slave actuators. Real-time m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More