

Robot contact force detecting method based on torque observation and friction identification
A robot and contact force technology, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as inability to compensate for robot joint friction errors and system model errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0063] The specific implementation of the present invention will be further described below in conjunction with the drawings and embodiments.
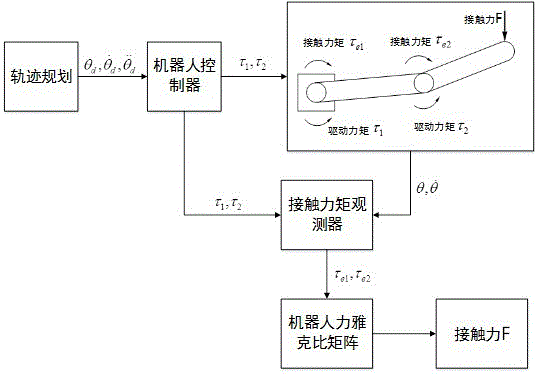
[0064] Such as figure 1 Shown is a schematic diagram of the detection of the two-degree-of-freedom robot end contact force proposed by the present invention. The robot controller calculates the joint drive torque to drive the robot according to the expected trajectory obtained from trajectory planning. The joint contact torque observer uses the feedback of the robot joint angle and The angular velocity and the joint driving torque are used to observe the joint contact torque, and finally the end contact force is obtained by calculating the Jacobian matrix.
[0065] A robot contact force detection method based on torque observation and friction identification, the specific steps are as follows:
[0066] Step 1: Construct joint contact torque observations from robot dynamic equations and generalized momentum, without collecting robot jo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More