

Prediction control algorithm based on motion linear model and area performance index
A predictive control algorithm and linear model technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve problems such as falling into local optimum and long solution time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0094] 1) Linearization assumptions, the present invention is based on the following four linearization assumptions.
[0095] Assumption 1: Based on the fact that the ship is moving at a low speed under dynamic positioning conditions, the influence of the Coriolis force is ignored;
[0096] Hypothesis 2: Assume that the ship's viscous hydrodynamic force is proportional to the ship's speed;
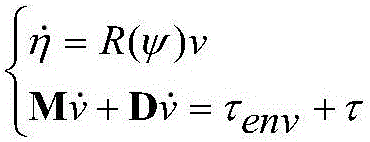
[0097] Hypothesis 3: In view of the slow bow movement of the ship, the coupling effect of the bow movement on the position movement within the prediction time is ignored, that is, the following ship motion equation is considered. The rotation matrix in is kept constant in the prediction steps taken;
[0098] Hypothesis 4: Assuming that the ship is equipped with sufficient position and heading sensors, and the ship’s position and heading are considerable, the unscented Kalman filter method [4] is used to obtain the low-frequency position and heading of the ship during the simulation calcul...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More