

Complementary filtering algorithm and cascade PID based four-rotor aircraft design method
A quadrotor aircraft, complementary filtering technology, applied in instruments, non-electric variable control, attitude control and other directions, can solve the problems of small size, low flight speed, complex aerodynamic principles of small UAVs, etc., to improve stability , the effect of increasing system stability and avoiding errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The present invention will be further described below in conjunction with accompanying drawing.
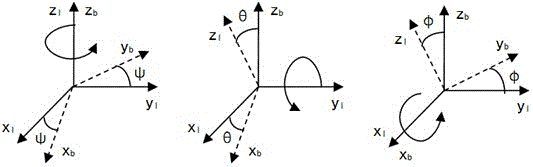
[0017] Before controlling the quadrotor, it is necessary to first calculate the body attitude. The direction, angle, speed and other information of the body need to be accurately described through a coordinate system. Take the center of mass of the body as the origin, and the direction of the nose is the positive direction of the xb axis to establish the carrier coordinate system B: [xb, yb, zb], and use the global coordinate system of the ground as the reference coordinate system L of the system: [xl, yl, zl ], the flying range of the airframe is relatively small, the curvature of the earth can be ignored, and the attitude information of the airframe can be obtained through the conversion between the two coordinate systems. The three Euler angles describing the attitude of the body, that is, the pitch angle (Pitch), the roll angle (Roll), and the yaw angle (Yaw) are repre...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More