

Method and system for programming a robot
A technology of robots and programs, applied in the field of robotics, can solve problems such as uneconomical engineering work, reprogramming of short production runs, etc., to achieve the effect of tolerance of geometric shape deviation, simple programming, and robust setting
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
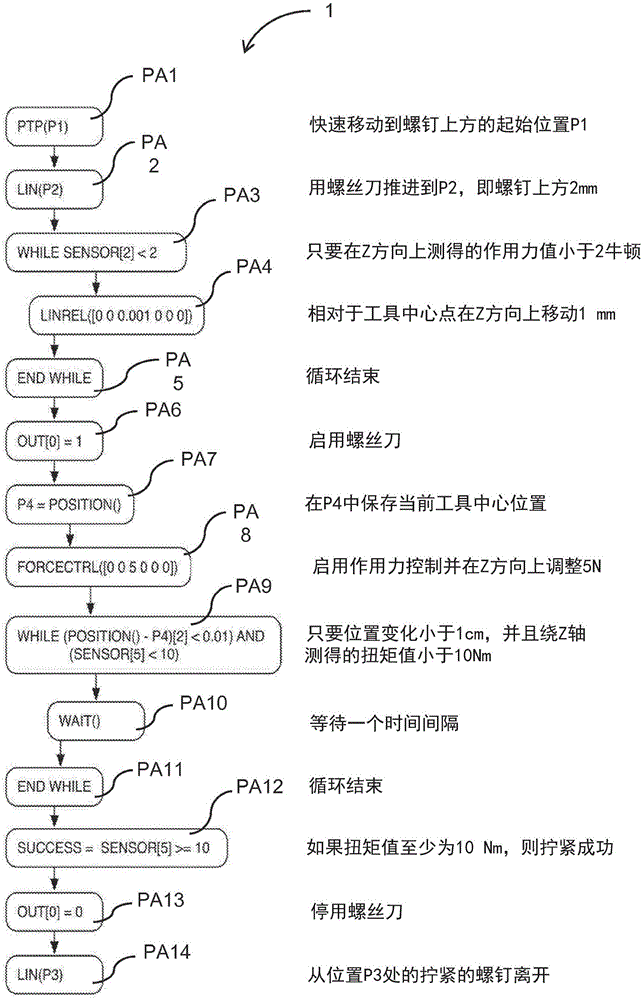
[0188] Figure 1 to Figure 12 An example of a common application is included, namely the programming of a robot that tightens a screw into a workpiece to a specific torque.
[0189] figure 1 A schematic diagram of an exemplary robot program 1 is shown, wherein a human will manually create a robot program 1 according to the prior art to tighten a screw to a predeterminable torque with a robot. In this specific example, according to figure 1 , the robot program 1 comprises instructions or robot commands intended to perform / do said tasks (in particular, in such a way that a human would currently have to program or create them manually). These boxes are individual robot commands with parameters. P1 , P2, P3 and P4 are teach points, preferably manually integrated by the programmer into the program as parameters. SENSOR[2] reads the Z value of the force / torque sensor on the robot; SENSOR[5] reads the torque around Z. OUT[0] = 1 or 0 enables or disables the screwdriver on the ro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More