

Air-ground amphibious four-footed emergency rescue investigation robot
An emergency rescue and robot technology, which is applied in the field of safety production monitoring and emergency rescue, can solve the problems of low video data resolution, data deviation, and difficulty in obtaining first-hand data quickly, and achieve simple structure of the walking mechanism, improved accuracy and effect of effectiveness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be described in further detail below in conjunction with the accompanying drawings.
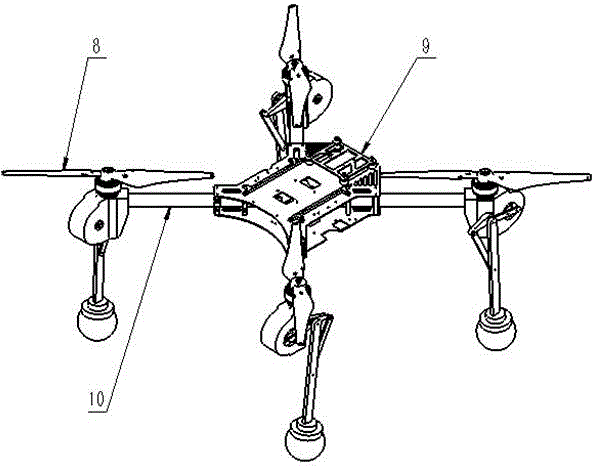
[0027] Such as figure 1 As shown, a ground-air amphibious four-legged emergency rescue and reconnaissance robot includes an unmanned aerial vehicle system, a quadruped system and a transmission system.
[0028] Described comprises fuselage 9, four machine arms 10, double output shaft motor 7, rotor 8, one end of four machine arms 10 is connected with four corners of fuselage 9 by fixing piece, and the other end is connected with double output shaft motor 7 and shell 11 phase connections. The four rotors 8 are respectively arranged on the tops of the four dual-output shaft motors 7 and the casing 11, and are fixed on the upper ends of the output shafts of the dual-output shaft motors 7;
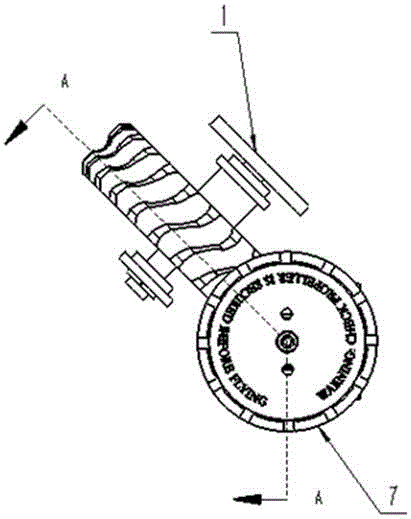
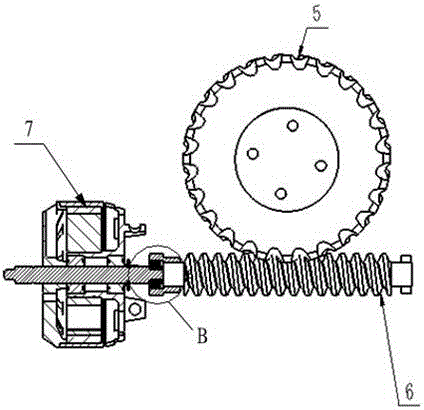
[0029] The transmission system includes a casing 11 connected to the machine arm 10, a worm gear drive mechanism arranged in the casing 11, and the input end of the worm ge...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More