

Method for reverse establishment of BIM model by using three-dimensional point cloud data
A technology of three-dimensional point cloud and point cloud data, which is used in electrical digital data processing, special data processing applications, instruments, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
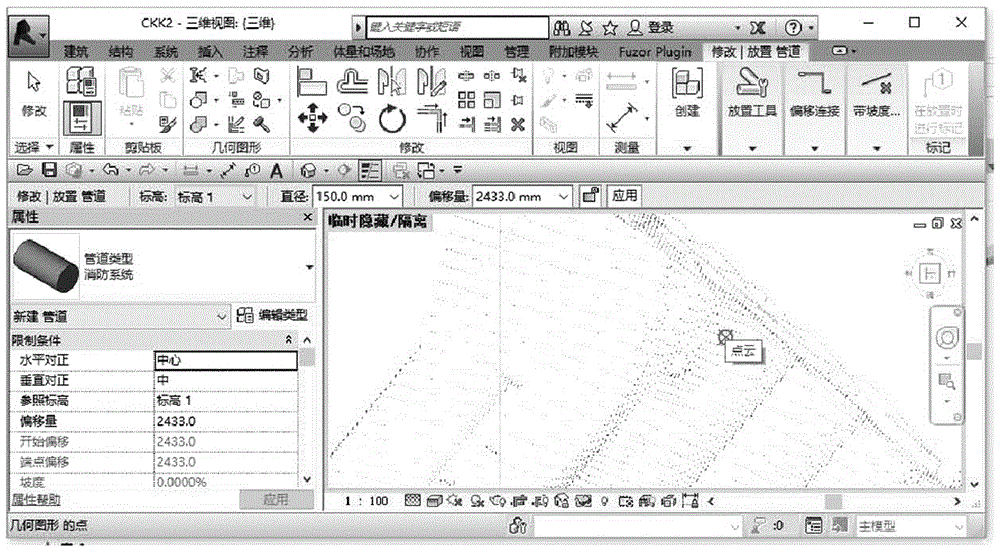
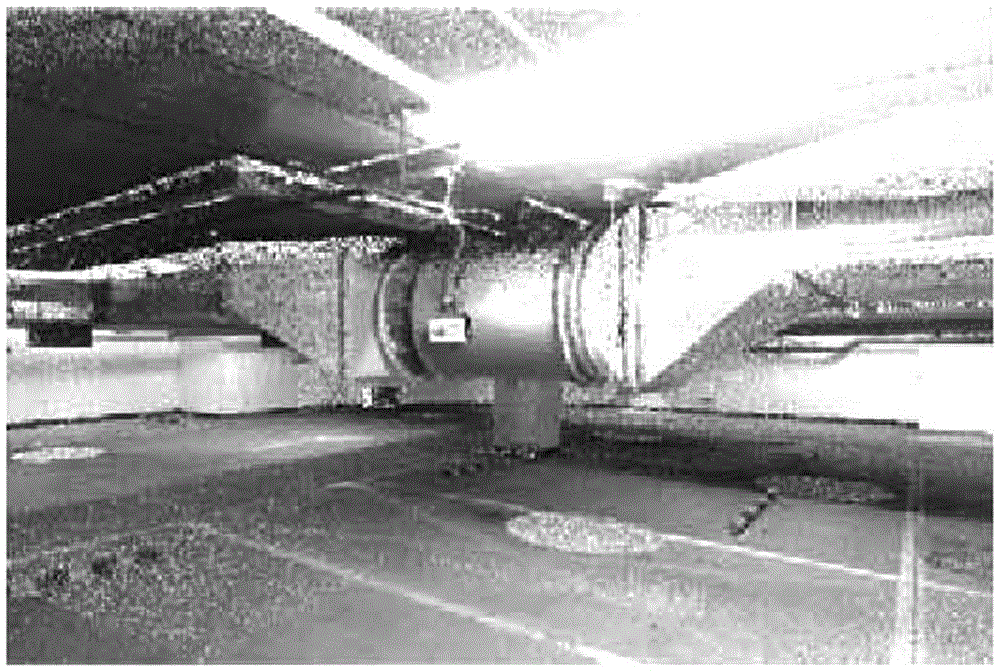
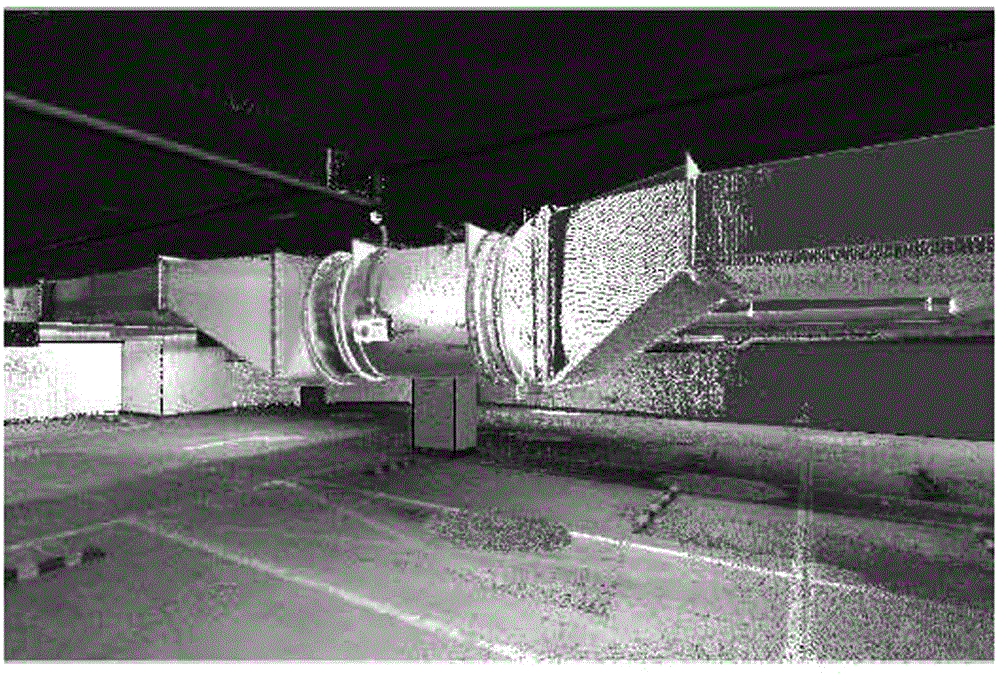
[0028] Embodiment 1 is a method for reversely establishing a BIM model from 3D point cloud data in the smoke exhaust fan area of an engineering equipment layer, see Figure 8 As shown, in the absence of completed technical archives, the construction site is scanned with a 3D laser scanner to present the real situation on the computer, but the editability of the point cloud data is very weak, so the point cloud data must be converted into BIM model, see figure 1 , figure 2 , image 3 , Figure 4 As shown, the steps are as follows:
[0029] Step 1. In the absence of completed technical archives, use a 3D laser scanner to scan the construction site, and use post-processing software to generate point cloud data in *.lass format: After post-processing software processing, remove noise points and Distortion point.
[0030] Step 2: Import the point cloud data in *.lass format into REVIT software to index the data into RCP format.
[0031] Step three, see figure 1 As shown, ...
Embodiment 2
[0038] Embodiment 2 is a method for reversely establishing a BIM model from 3D point cloud data in the channel area of an engineering equipment layer, see Figure 8 As shown, in the absence of completed technical archives, the construction site is scanned with a 3D laser scanner to present the real situation on the computer, but the editability of the point cloud data is very weak, so the point cloud data must be converted into BIM model, see Figure 5 , Figure 6 , Figure 7 As shown, the steps are as follows:
[0039] Step 1. In the absence of completed technical archives, use a 3D laser scanner to scan the construction site, and use post-processing software to generate point cloud data in *.lass format: After post-processing software processing, remove noise points and Distortion point.
[0040] Step 2: Import the point cloud data in *.lass format into REVIT software to index the data into RCP format.
[0041] Step three, see figure 1 As shown, insert the point clou...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More