

Image-based uncalibrated visual servo manipulator and control method thereof
A control method and manipulator technology, applied in the directions of manipulator, program control manipulator, image feedback, etc., can solve problems such as inability to control work independently, and achieve the effect of high work efficiency and strong adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] The present invention will be further described in detail below in combination with specific embodiments. However, it should not be understood that the scope of the above subject matter of the present invention is limited to the following embodiments, and all technologies realized based on the content of the present invention belong to the scope of the present invention.
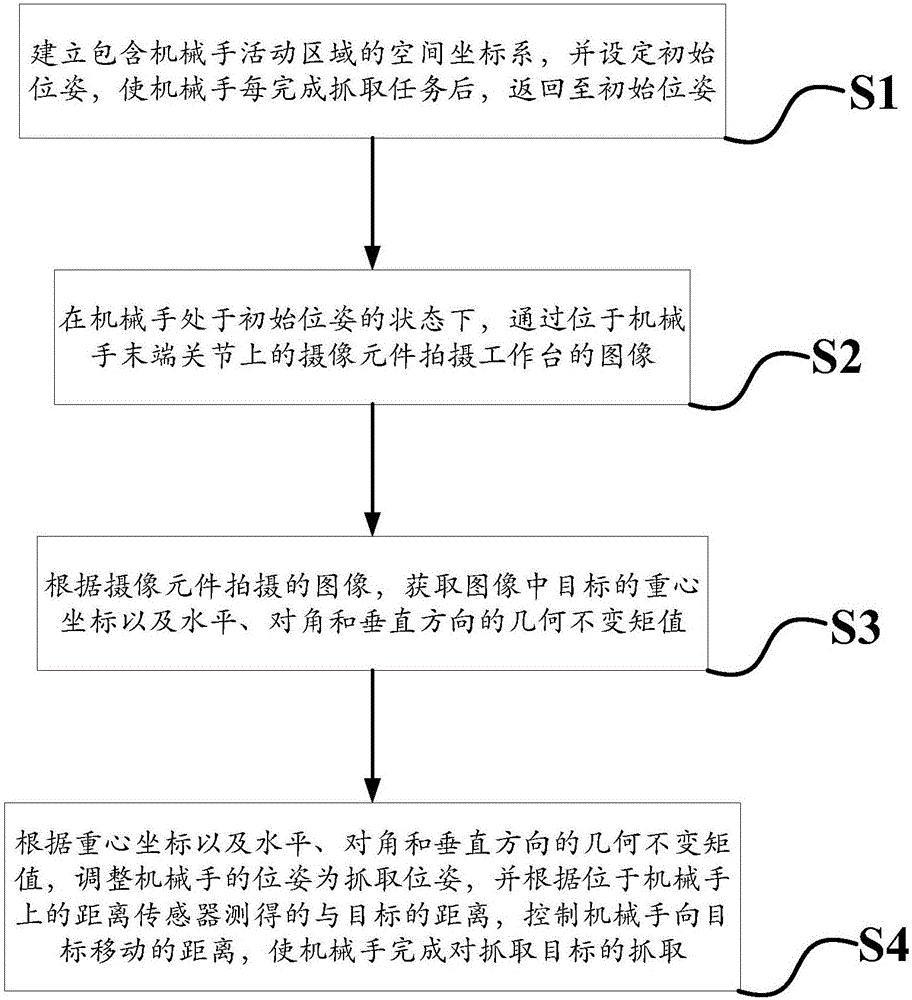
[0042] combine figure 1 The schematic flow chart of the present invention shown; wherein, the present invention is based on the control method of the image-free visual servo manipulator comprising the following steps,
[0043] S1: Establish a space coordinate system including the active area of the manipulator, and set an initial pose, so that the manipulator returns to the initial pose after each grasping task is completed. The established spatial coordinate system is based on the horizontal plane of the workbench as the xy plane, and the direction perpendicular to the horizontal plane is the z-ax...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More