

Air joint type flexible mechanical arm based on rope drive
A flexible manipulator and rope-driven technology, applied in the field of manipulators, can solve problems such as the weight of the manipulator, affecting the flexibility of the manipulator, mobility, safety and carrying capacity of man-machine cooperation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
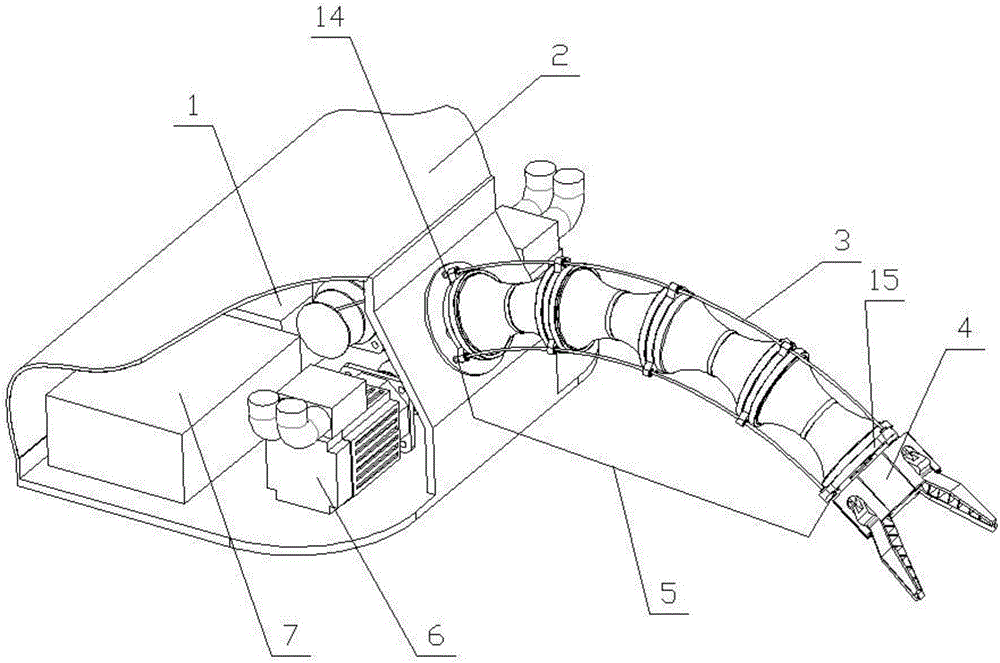
[0020] exist figure 1 In the shown schematic diagram of the air-joint flexible manipulator based on rope drive, the machine base 2 is the shell, and three motors 6, power supply 1 and control system 7 are arranged in the machine base; the arm-body mechanism 5 consists of several groups of The joint units are connected in series, two joint units constitute a two-stage robotic arm, three joint units constitute a three-stage robotic arm, and this embodiment is a four-stage robotic arm; one end of the arm body mechanism is connected to the machine base , the other end of which is connected to the end effector 4 to grab the target object; the driving rope 3 is three evenly distributed in the circumferential direction, one end of each rope is fixed at the end of the arm body mechanism, and the other end passes through each The wire holes of the joint unit are connected to the rollers of the three motors in the frame;
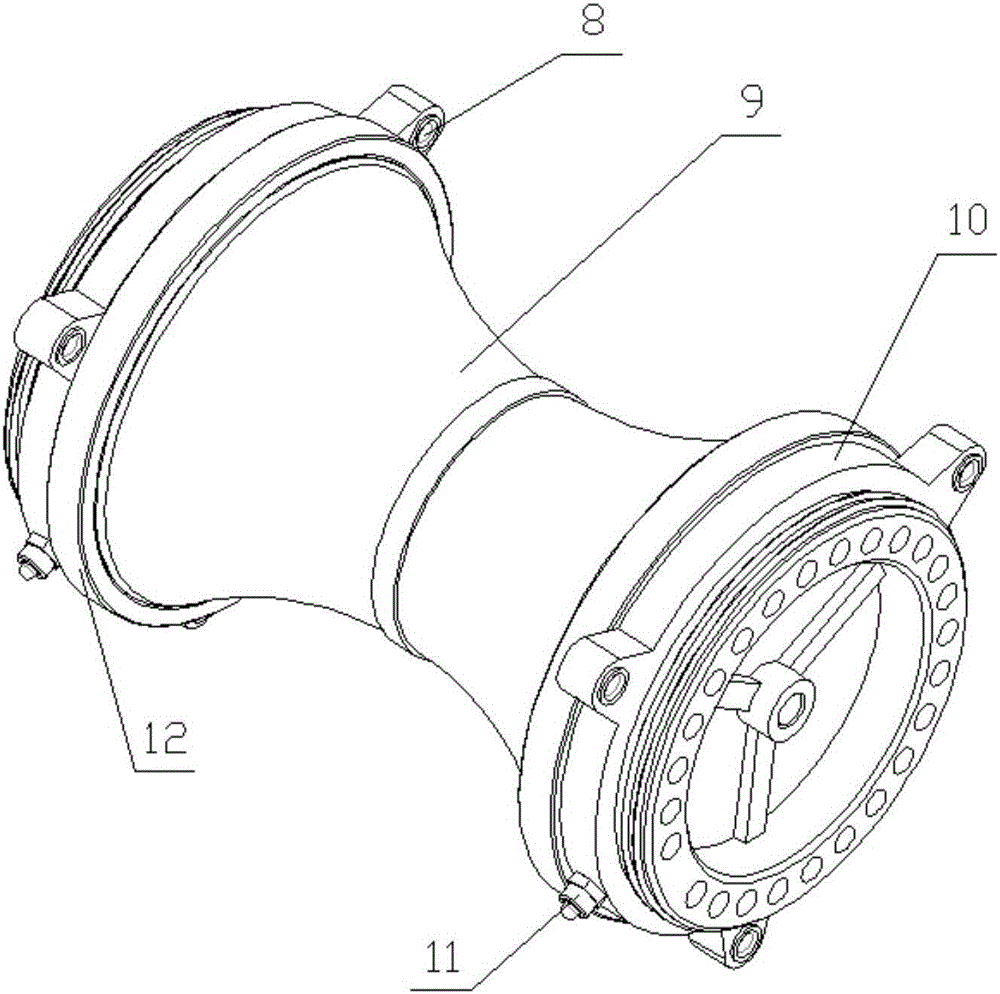
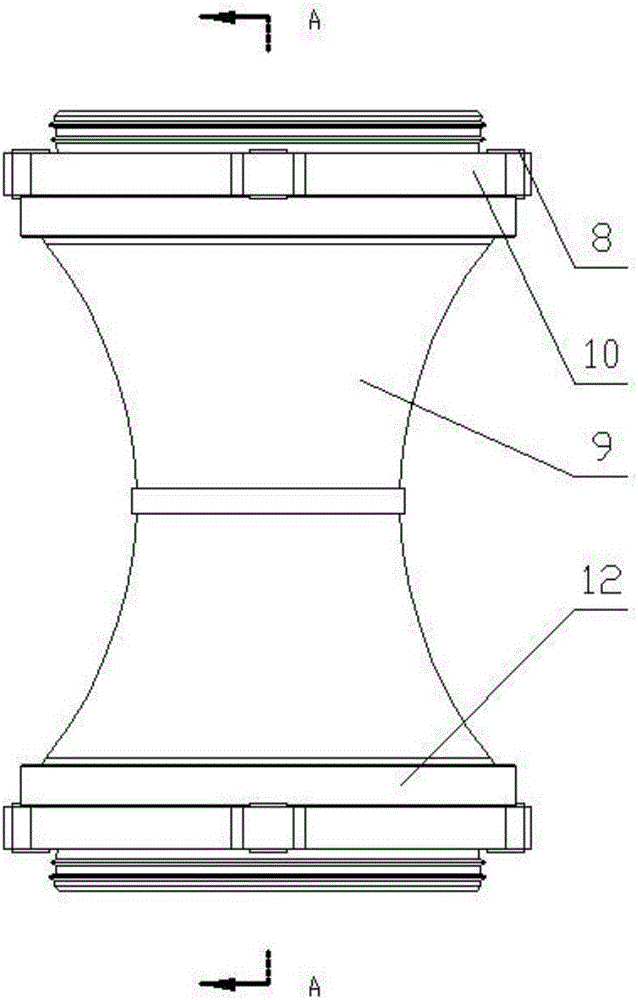
[0021] Such as figure 2 , 3 As shown in and 4, the joint uni...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More