

Precision navigation substation patrol inspection UAV system
A technology of unmanned aerial vehicles and substations, applied in control/regulation systems, non-electric variable control, three-dimensional position/channel control, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
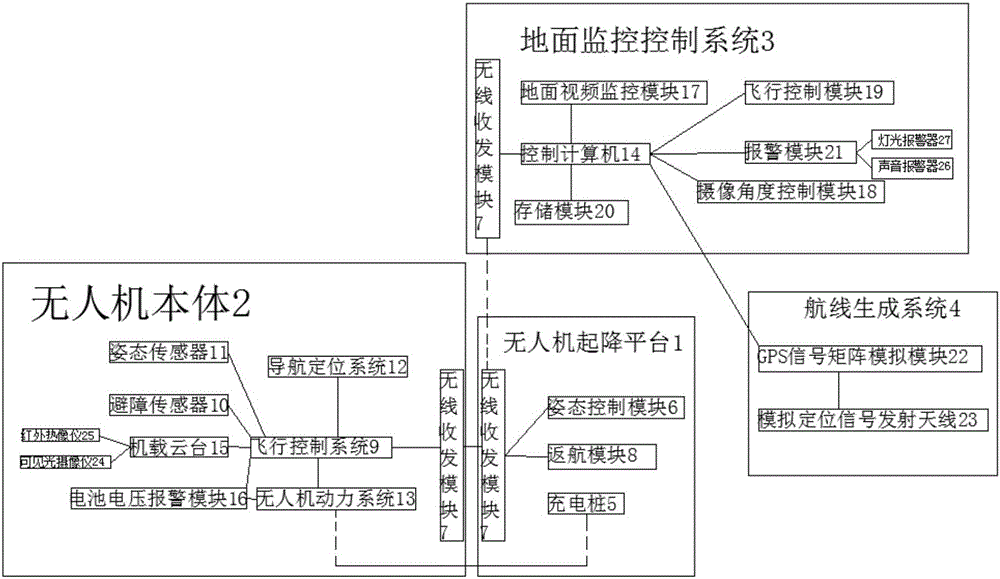
[0013] figure 1 Show the specific implementation of the present invention: a precise navigation substation inspection UAV system, including UAV take-off and landing platform 1, UAV body 2, ground monitoring and control system 3 and route generation system 4, the unmanned The aircraft take-off and landing platform 1 includes an attitude control module 6, a wireless transceiver module 7, an anti-navigation module and a charging pile 5. The attitude control module 6 and the return module 8 are electrically connected to the wireless transceiver module 7. The drone body 2 It is equipped with flight control system 9, obstacle avoidance sensor 10, attitude sensor 11, navigation and positioning system 12, unmanned aerial vehicle power system 13, wireless transceiver module 7 and airborne cloud platform 15, and described flight control system 9 is connected with navigation and positioning system respectively. System 12, attitude sensor 11, obstacle avoidance sensor 10, airborne gimbal ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More