

Multifunctional AUV based on bionic lateral line
A multi-functional, lateral line technology, applied in two-dimensional position/channel control, vehicle position/route/altitude control, ships and other directions, can solve the problem of underwater pipeline stakeout and detection and positioning, underwater transportation navigation, layout, Problems such as difficult calibration and maintenance, limited scope of action, etc., achieve the effect of novel structure, low cost, and stable support effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
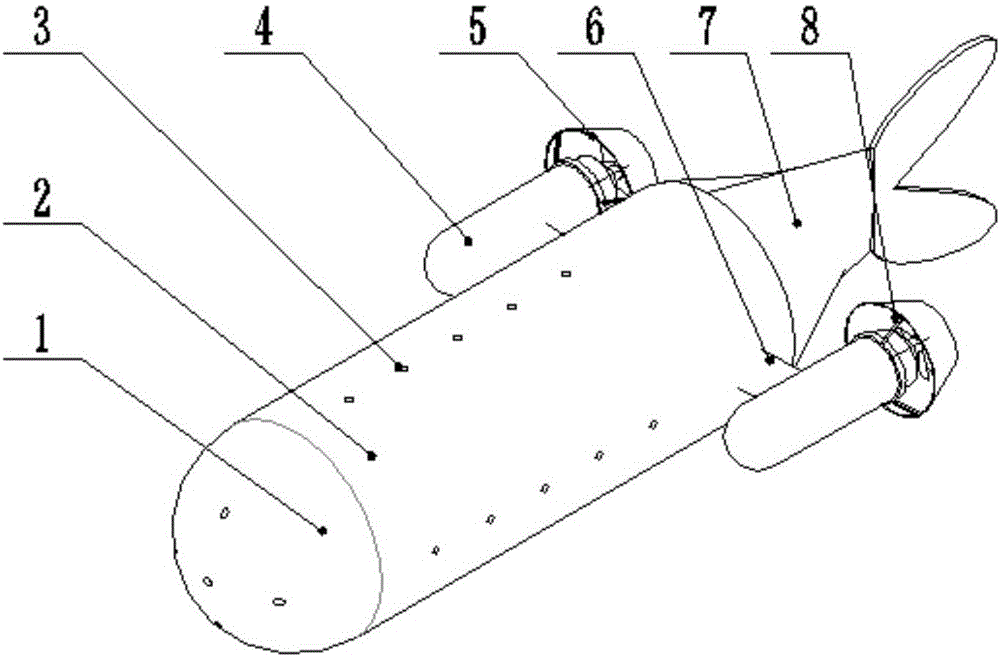
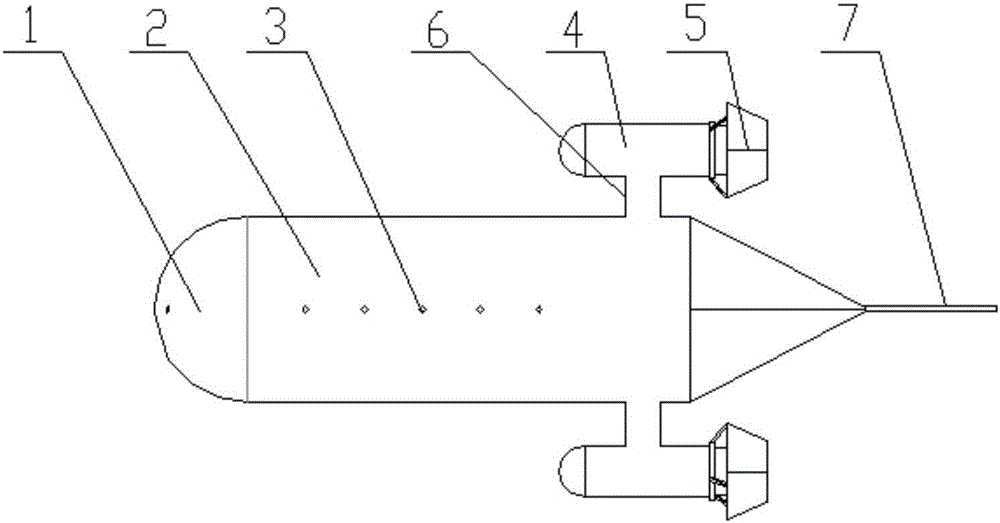
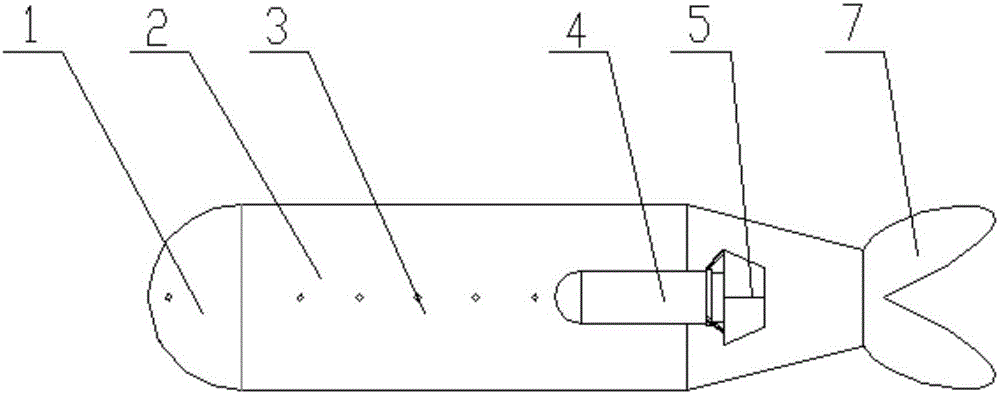
[0028] like Figure 1 to Figure 4 As shown, a multifunctional AUV based on bionic sidelines includes a front head warehouse 1, a main body warehouse 2, a sensor 3, a propeller 4, a shroud 5, a steering gear 6, a tail 7 and blades 8, and the front head warehouse 1, The main body compartment 2 and the tail part 7 are connected head to tail in a streamlined shape, the body compartment is set as a cylindrical compartment, the front compartment 1 is set as a spherical structure, and the front compartment 1 and the main compartment 2 are evenly arranged with bionic side lines and sensor holes are arranged. There are 5 sets in the front head compartment 1, and 20 are evenly arranged on the four sides of the main compartment 2, wherein every 5 sensor holes on the main compartment 2 are set on the same plane, and the distance between adjacent planes is 50mm, and multiple sensors 3 are arranged to form As shown in the linear structure of the bionic side, the sensor 3 is set as a pressur...
Embodiment 2
[0030]The advancing, turning, rising and sinking of the AUV device realizes the movement of six degrees of freedom through the propeller 4 and the steering gear 6 . The sensor 3 is welded on the PCB circuit board and embedded in the carrier shell, leaving a sensing joint in contact with the outside world. It also includes a single-chip microcomputer 9 placed inside the carrier shell, a step-down module, a radio frequency module 12 and a battery 11. The battery 11 passes through the The watertight connector charges the inside and controls the overall internal power supply, and the connection part is watertight through the O-ring. The single-chip microcomputer 9, the radio frequency module 12 and the battery 11 etc. are placed inside the carrier, and the inside is charged through the watertight joint and the overall internal power is controlled. The connection part is made watertight by O-ring.
[0031] The main controller of the single-chip microcomputer 9 of the control syste...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More