

Wall climbing robot adsorbed on steel wall surface
A wall-climbing robot and wall surface technology, which is applied in the field of wall-climbing robots, can solve problems such as being unsuitable for crane inspection and use, and achieve good adsorption effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be further described below in conjunction with the accompanying drawings.
[0028] 1. The overall structure of the wall-climbing robot for large port cranes
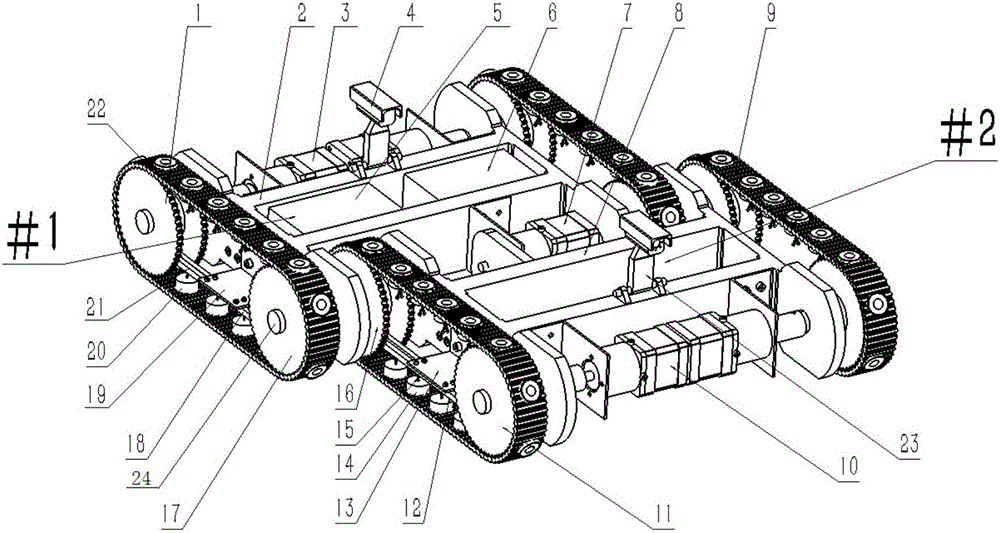
[0029] Such as figure 1 Shown is a schematic diagram of the overall mechanism of the wall-climbing robot.
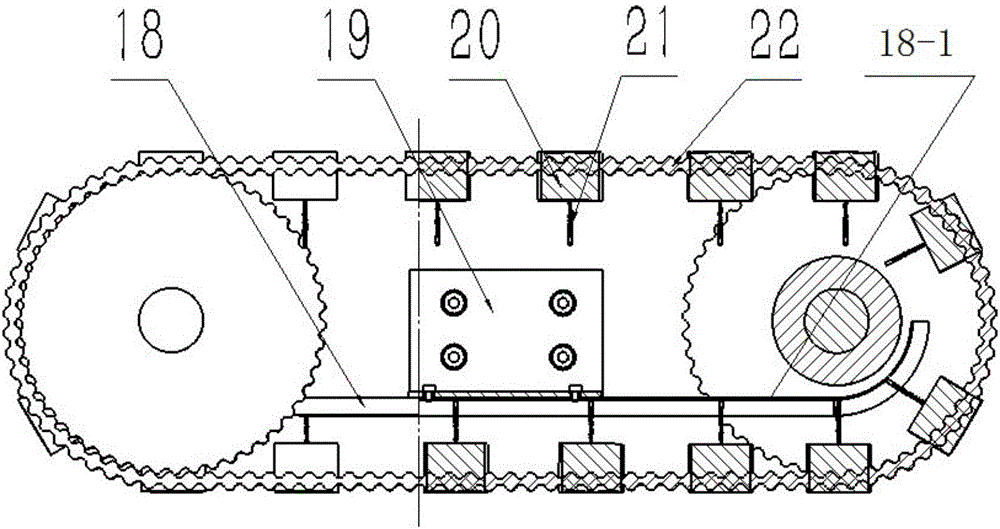
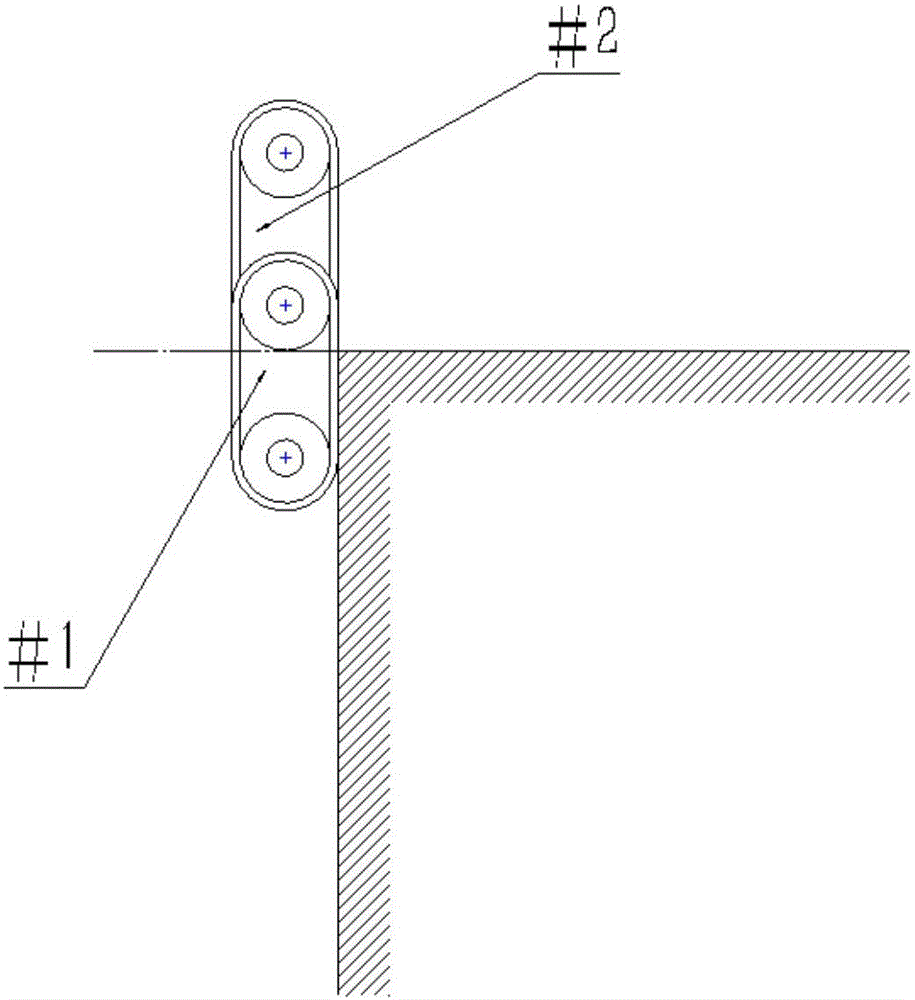
[0030]The wall-climbing robot consists of #1 crawler and #2 crawler. #1 crawler includes: driving wheel 1, frame 2, stepping motor 3, camera 4, controller 5, battery pack 6, driven wheels 17, electric brush chute 18, conductive plate 18-1, chute support frame 19, electromagnet 20, electric brush 21, crawler belt 22 and wall replacement motor 7. #2 crawler includes: frame 8, crawler belt 9, stepping motor 10, driving wheel 11, brush chute 12, conductive plate (not shown), chute support frame 13, electromagnet 14, electric brush 15 , driven wheel 16 and camera 23, hinge shaft 24.
[0031] 2. Adsorption and movement mode
[0032] The wall-climbing robot adopts the electromagnetic...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More