

Six-axis industrial robot fault diagnosis method and system based on AR model
A fault diagnosis system and technology of industrial robots, applied in the direction of instruments, computer parts, character and pattern recognition, etc., can solve the problems of wide fault location, low fault diagnosis efficiency, difficult real-time monitoring, etc., to solve the problem of difficult fault diagnosis, The effect of improving the efficiency of fault diagnosis and reducing the scope
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0021] Embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings;
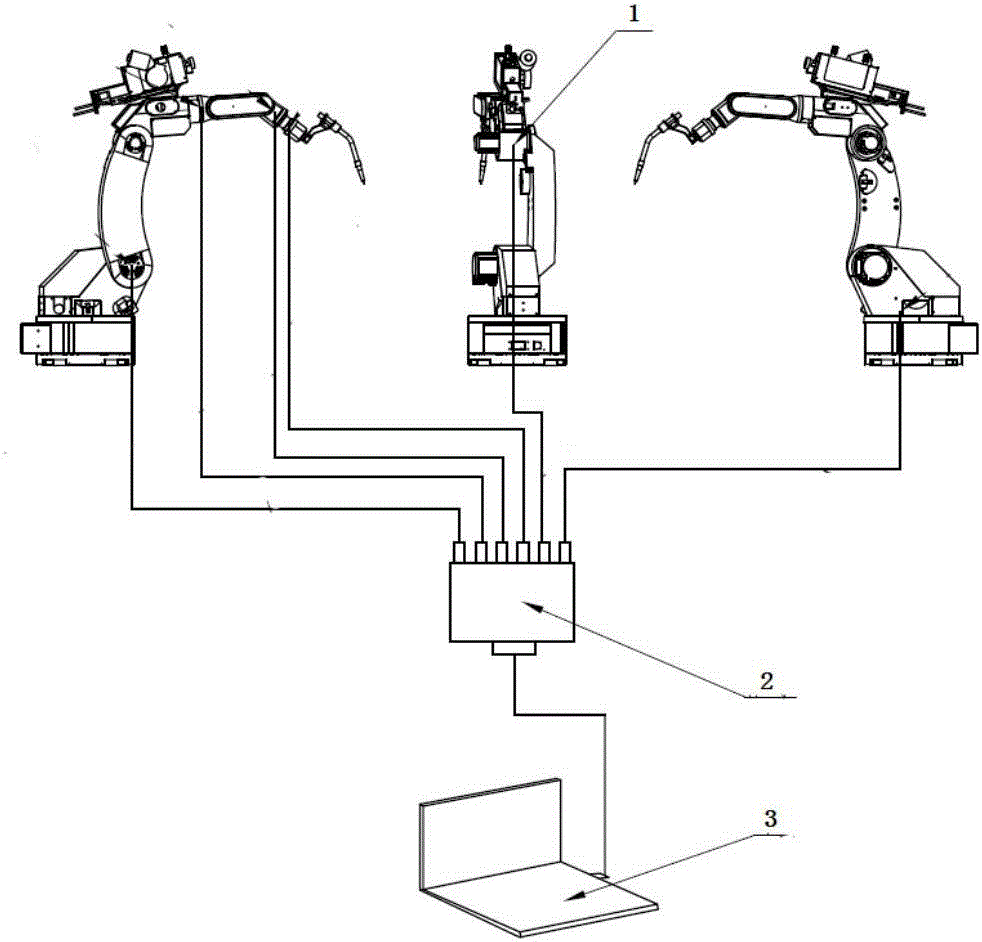
[0022] Such as figure 1 As shown, a six-axis industrial robot fault diagnosis system based on the AR model includes: at a specific operating speed of each axis, six vibration acceleration sensors 1 installed at specific positions transmit vibration signals through signal acquisition cards 2 X(t) is transmitted to the processing device 3, which is a computer in this embodiment. The computer preprocesses the vibration signal X(t) through EMD (Empirical Mode Decomposition, empirical mode decomposition algorithm), and decomposes it into a smooth signal IMF component c with different characteristic scales 1 (t), c 2 (t),...,c n (t); build an autoregressive model AR(m) for any IMF component decomposed by EMD, and extract its model parameters and variance as the fault feature vector unit; use the above-mentioned autoregressive model AR (m) to carry out A...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More