Method and system for human-robot motion data mapping
A technology of robot motion and motion data, applied in the field of robot learning, can solve problems such as limited models, non-convergence, and weak generalization ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] In order to have a clearer understanding of the technical features, purposes and effects of the present invention, the method and system for mapping human-robot motion data proposed by the present invention will be further described in detail with reference to the accompanying drawings.
[0028] In order to better understand the present invention, some concepts involved in the present invention are introduced first.
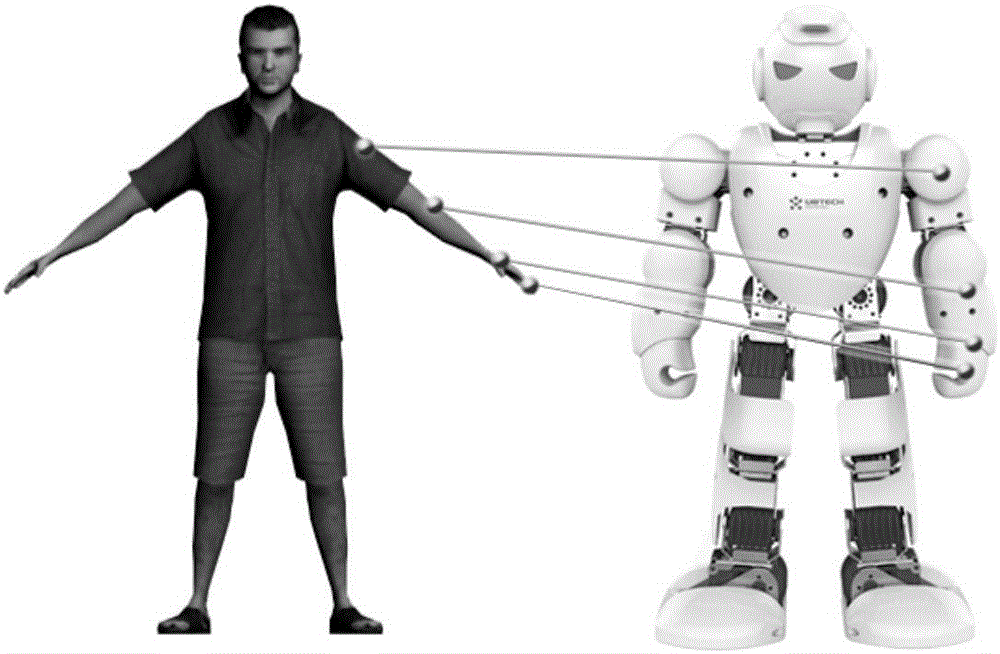
[0029] In the present invention, a robot / humanoid robot refers to an automated machine, which has some intelligent capabilities similar to humans, such as perception, planning, action and coordination, and is a highly flexible automated machines.
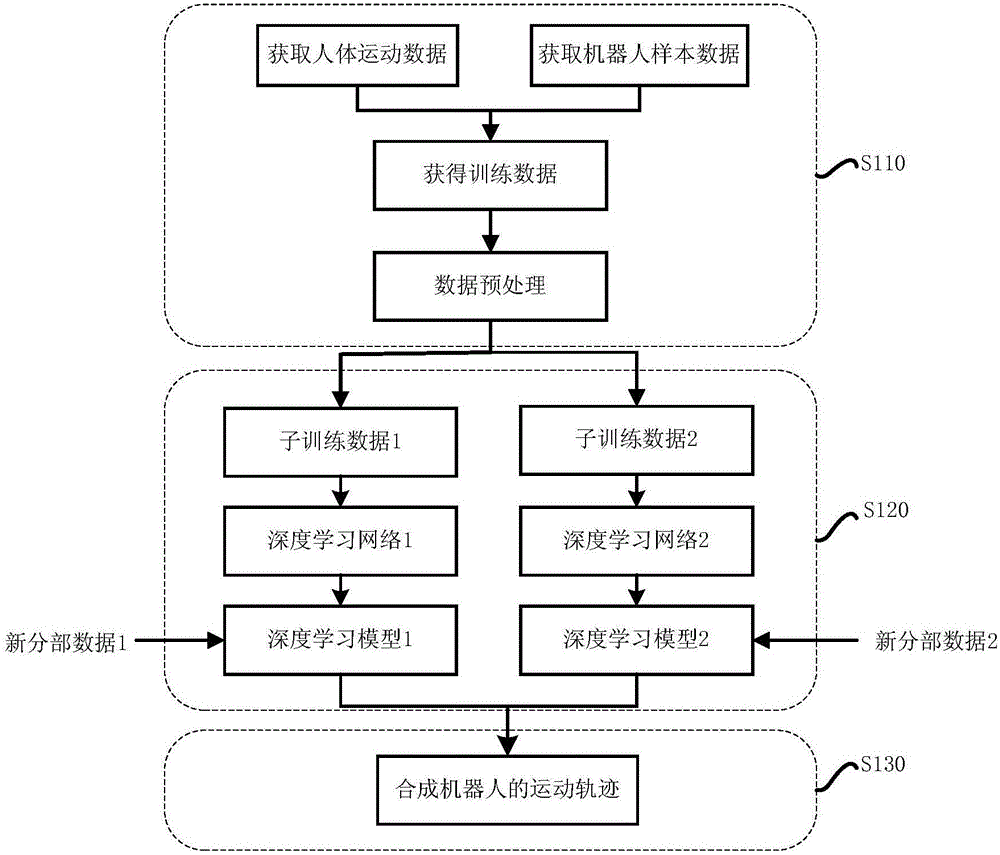
[0030] The deep learning network adopts a layered structure similar to that of the neural network: a multi-layer network including an input layer, a hidden layer (can include a single layer or multiple layers), and an output layer. Only adjacent layer nodes are connected, while the same layer and There is no co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com