Variable degree-of-freedom multilink welding machine driven by servo motor
A technology of servo motors and degrees of freedom, applied in the mechanical field, can solve the problems of reducing mechanism weight, motion inertia, volume and cost, high precision requirements, complex structure, etc., and achieve flexible and diversified motion trajectories, high precision, and low inertia Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
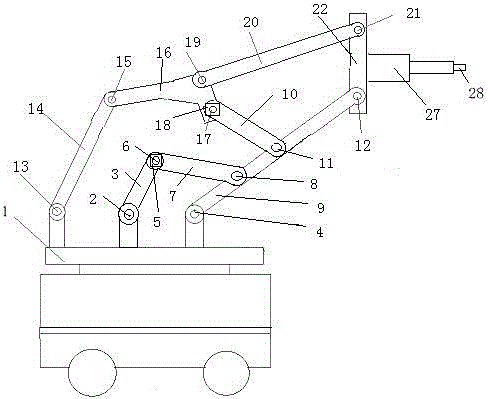
[0007] The present invention has a servo motor-driven multi-link welding robot arm with variable degrees of freedom, including a base 1, a boom lifting mechanism, a wrist link pitching mechanism, a wrist 27, a welding torch 28, a servo drive device and a first lock tightening device 5 and the second locking device 18; the boom lifting mechanism is made up of boom 9 and lifting mechanism, and the boom 9 is connected on the frame 1 through the tenth rotating pair 4, the first lifting mechanism of the lifting mechanism One end of the four connecting rods 3 is connected to the base 1 through the second rotating pair 2, the other end is connected to the fifth connecting rod 7 through the third rotating pair 6, and the other end of the fifth connecting rod 7 is connected to the boom 9 through the fourth rotating pair 8 connection; the wrist link pitching mechanism is made up of the wrist link 22 and the pitching mechanism, the wrist link 22 is connected to the big arm 9 through the t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com