

Decoupling Correction Method for Asynchronous Motor Rotor Resistance and Exciting Inductance
A technology for asynchronous motors and excitation inductance, which is applied in the control of generators, motor generators, electronic commutation motors, etc., and can solve problems such as the influence of the transient performance of the correction scheme and failure to be better
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0115] The present invention will be further described below with reference to the drawings and embodiments.
[0116] In the signal acquisition part, the stator voltage vector V and the stator current vector i are obtained by sampling the stator line voltage U ab , Stator line voltage U cb , Stator A phase current i A , Stator B phase current i B , Stator C phase current i C , And obtained by transforming the three-phase stationary coordinate system to the two-phase stationary coordinate system, the actual rotor electrical angular velocity ω r It is obtained by photoelectric rotary encoder.
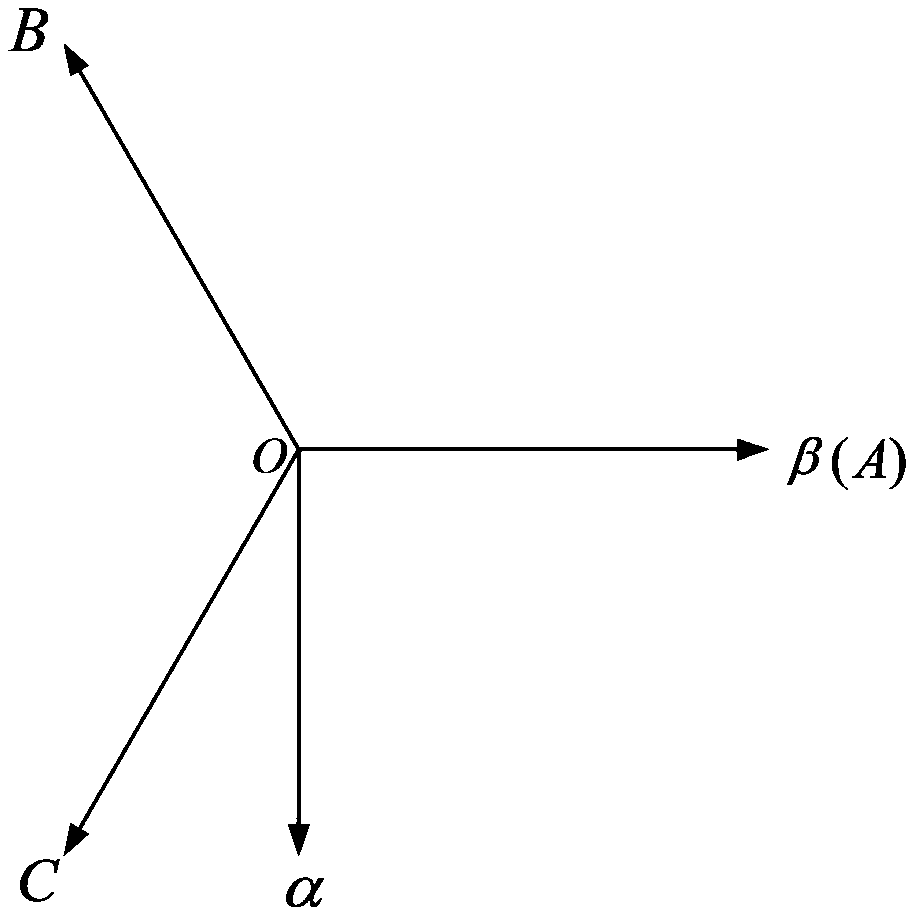
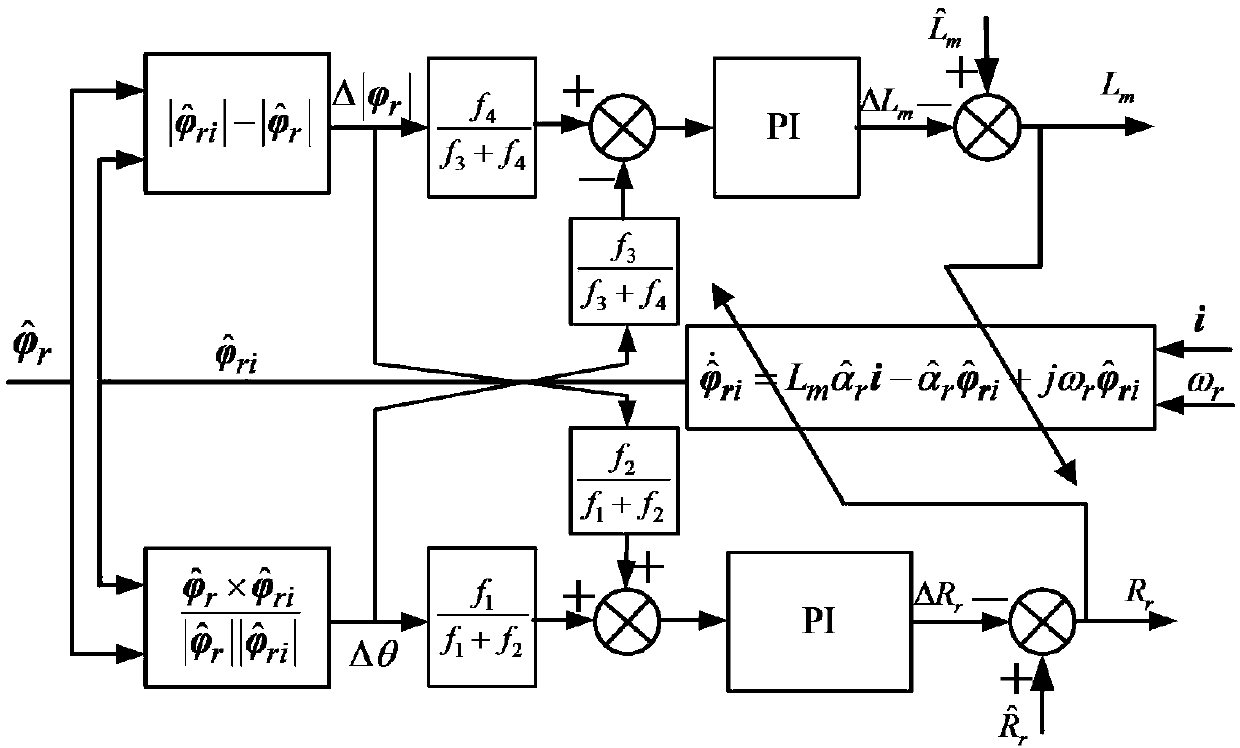
[0117] figure 1 Is the stationary coordinate system selected in the present invention, figure 2 It is a structural block diagram of the correction principle in the present invention. See figure 1 with figure 2 , This embodiment is carried out as follows.
[0118] Step 1. Collect the stator voltage vector V, stator current vector i and rotor electrical angular velocity ω of the asynchronous ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More