

Manipulator-boat coordination control method of underwater unmanned vehicle and manipulator system
A technology of unmanned aerial vehicles and coordinated control, which is applied in the direction of manipulators, program-controlled manipulators, and manufacturing tools. Positioning and job control, ensuring smooth motion, adaptable effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
[0032] The present invention is:
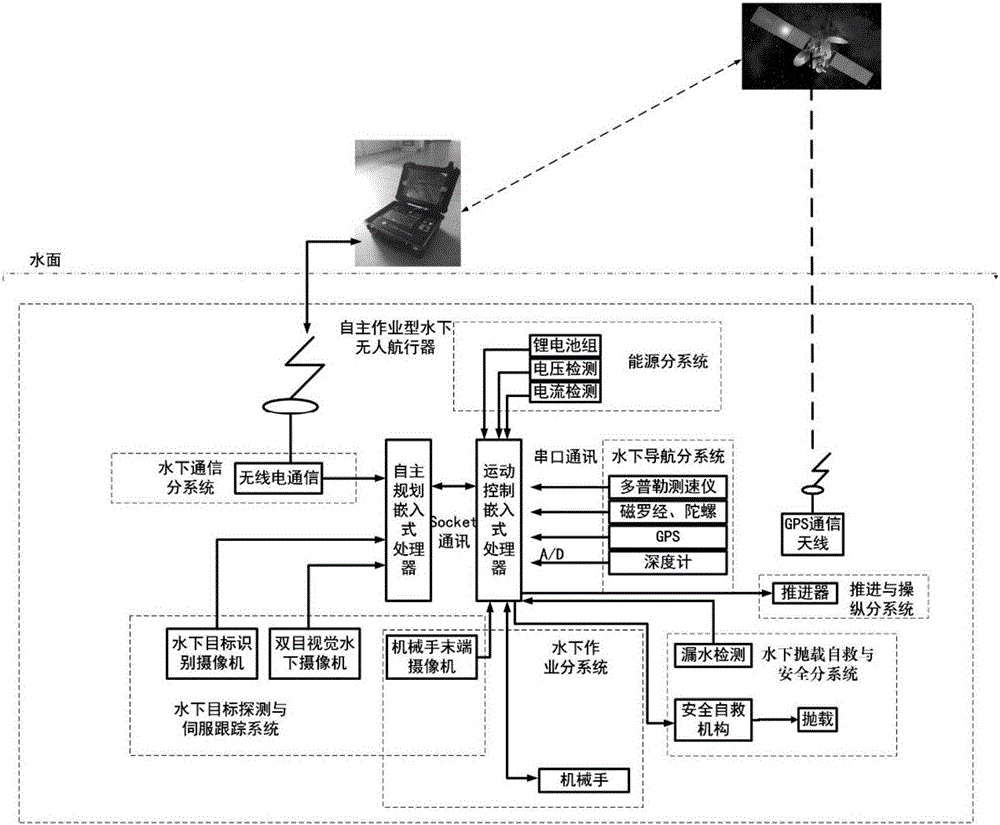
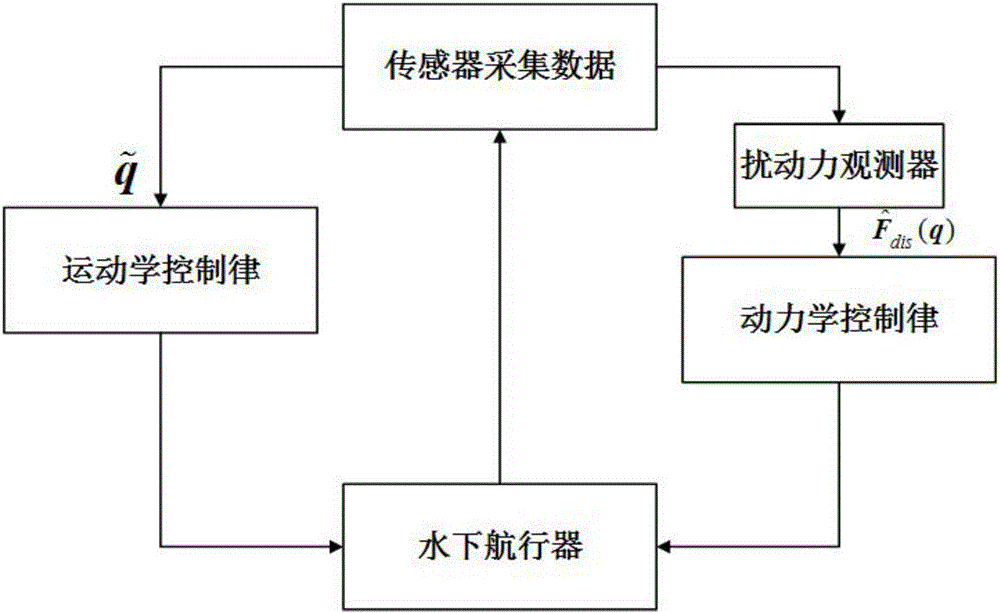
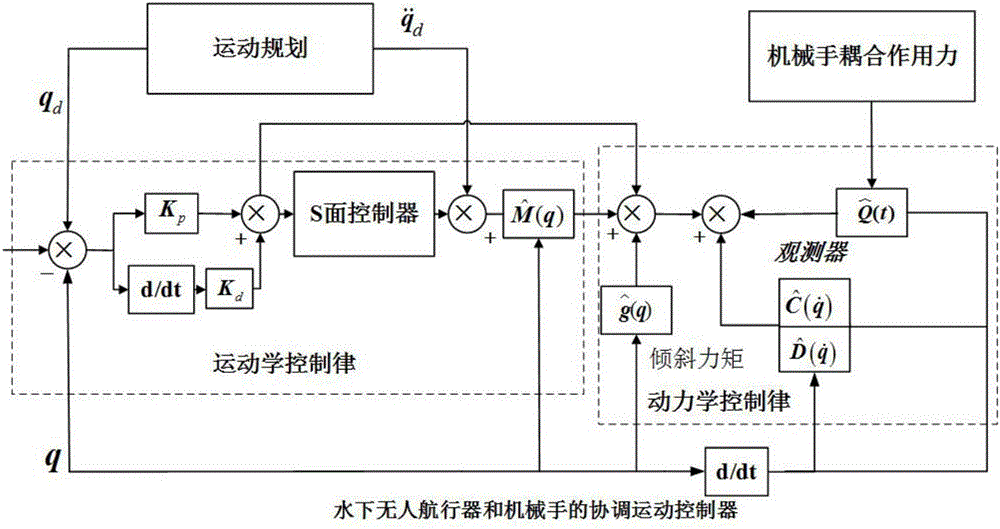
[0033] a. The hand-boat coordinated control method of the underwater unmanned vehicle manipulator system consists of two parts: the underwater unmanned vehicle control system and the coordinated control controller. The underwater unmanned vehicle control system is mainly composed of PC104 core module, I / O board, can data acquisition board, isolated serial port board, data acquisition board, DC servo motor control board, manipulator DC servo motor driver, encoder, manipulator motor, Composed of thruster propeller and its motor driver, magnetic compass, depth gauge, and Doppler speedometer. The controller collects the data of the Doppler velocimeter and magnetic compass through the isolated serial board, and calculates the ship's position through the PC104 module to obtain the current position and att...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More