A Robot Accuracy Compensation Method Combining Pose Error Model and Stiffness Compensation
An error model and precision compensation technology, applied in the field of robot calibration, can solve problems such as complex process and low efficiency, and achieve the effect of improving online work efficiency and eliminating the calculation and derivation process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
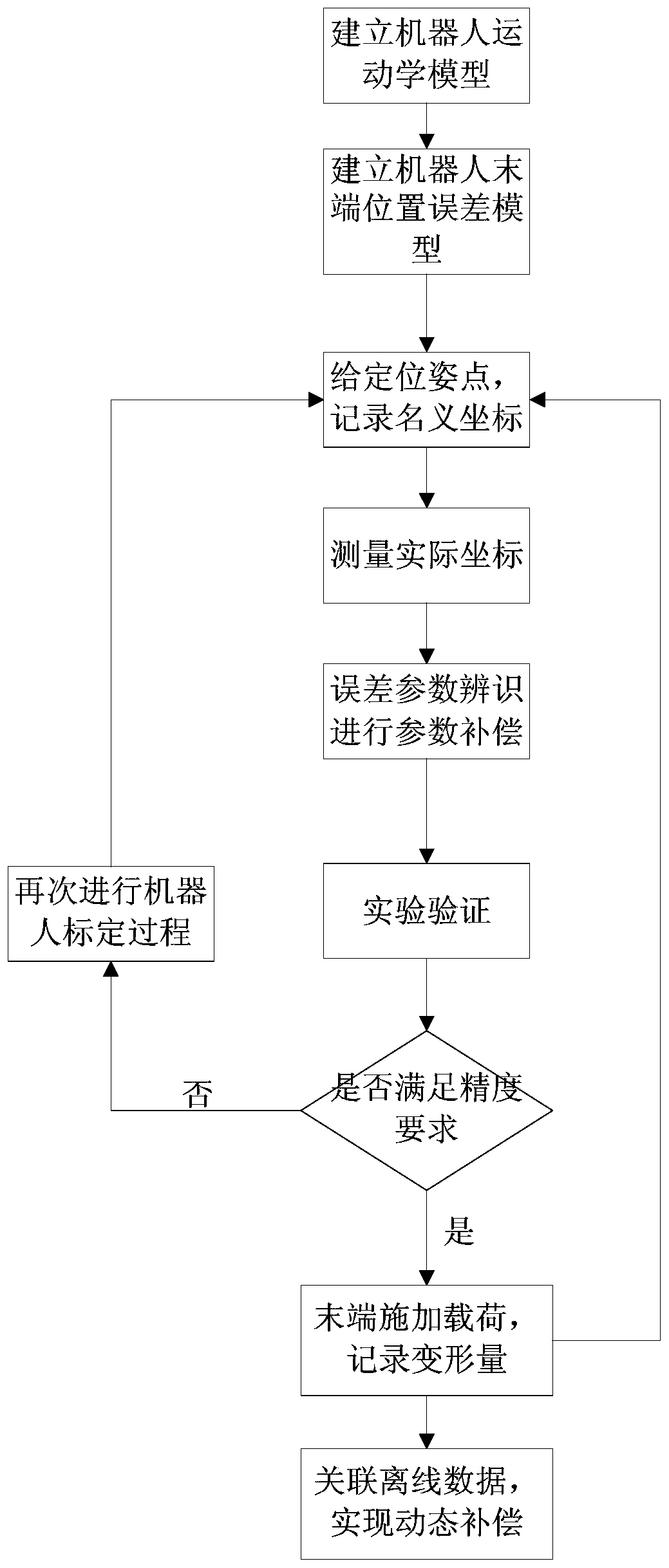
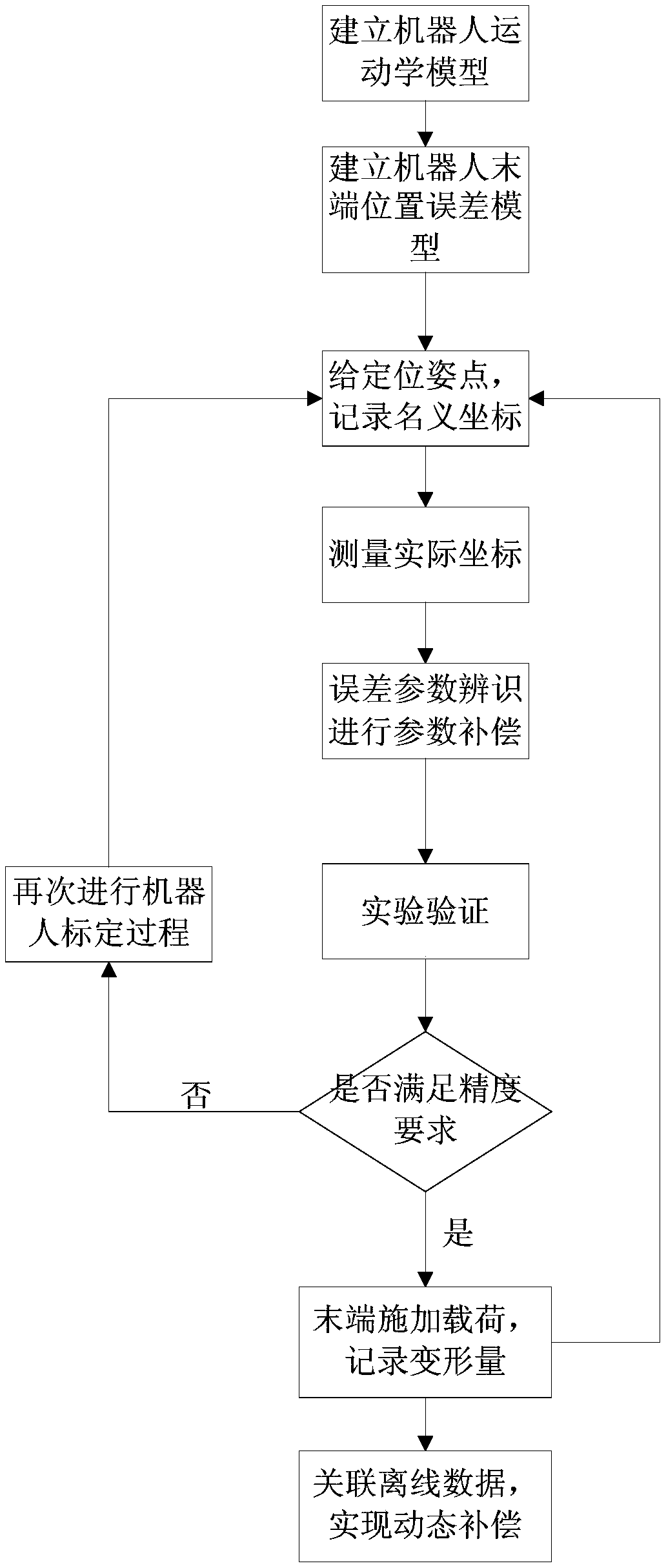
[0045] combine figure 1 , figure 2 , a kind of robot precision compensation method of comprehensive pose error model and stiffness compensation of the present invention, comprises the following steps:
[0046] Step 1. Establish a robot motion model according to the structural parameters of the robot; specifically:
[0047] Step 1-1, establish the homogeneous transformation matrix between adjacent joints of the robot according to the DH method, the matrix is:
[0048]
[0049] In the above formula, a i is the connecting rod length, α i is the joint torsion angle, d i is the connecting rod offset, θ i is the joint rotation angle, X is the X axis of the link coordinate system, and Z is the Z axis of the link coordinate system.
[0050] Step 1-2. Introduce the rotation Rot(y, β) around the y-axis to the homogeneous transformation matrix established in step 1-1, and eliminate the singularity between the intermediate links when the axes are parallel or nearly parallel. Adj...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com