

Non-line-of-sight control system for underwater robot
A technology for underwater robots and control systems, which is applied in the direction of electric controllers, program-controlled manipulators, and controllers with specific characteristics, etc., to achieve the effects of improving control accuracy, reducing operation difficulty, and reducing error range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The specific embodiments provided by the present invention will be described in detail below in conjunction with the accompanying drawings.
[0034] The reference signs and components involved in the accompanying drawings are as follows:
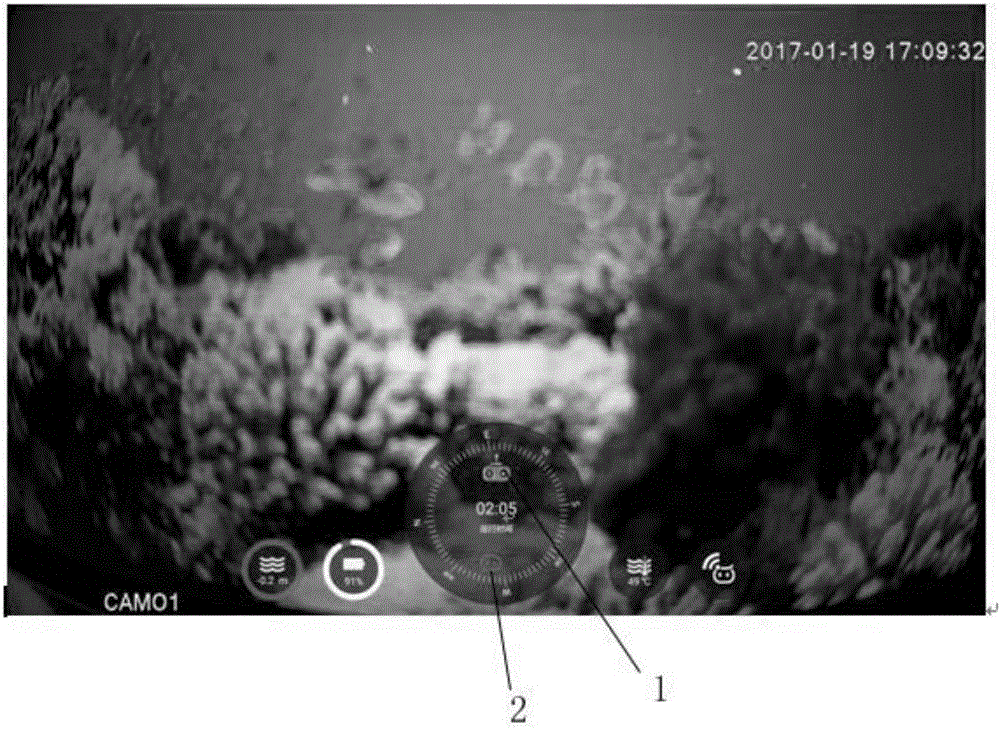
[0035] 1. First handle 2. Second handle
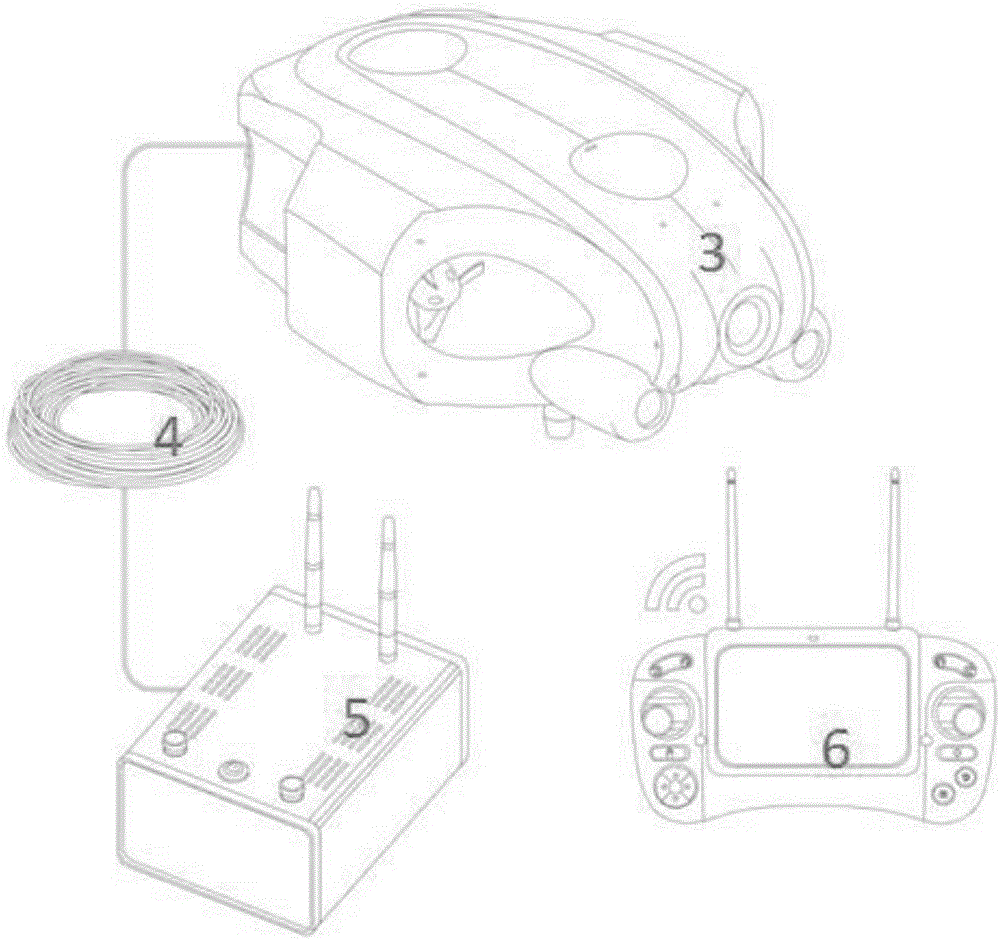
[0036] 3. Main body of underwater robot 4. Umbilical cable
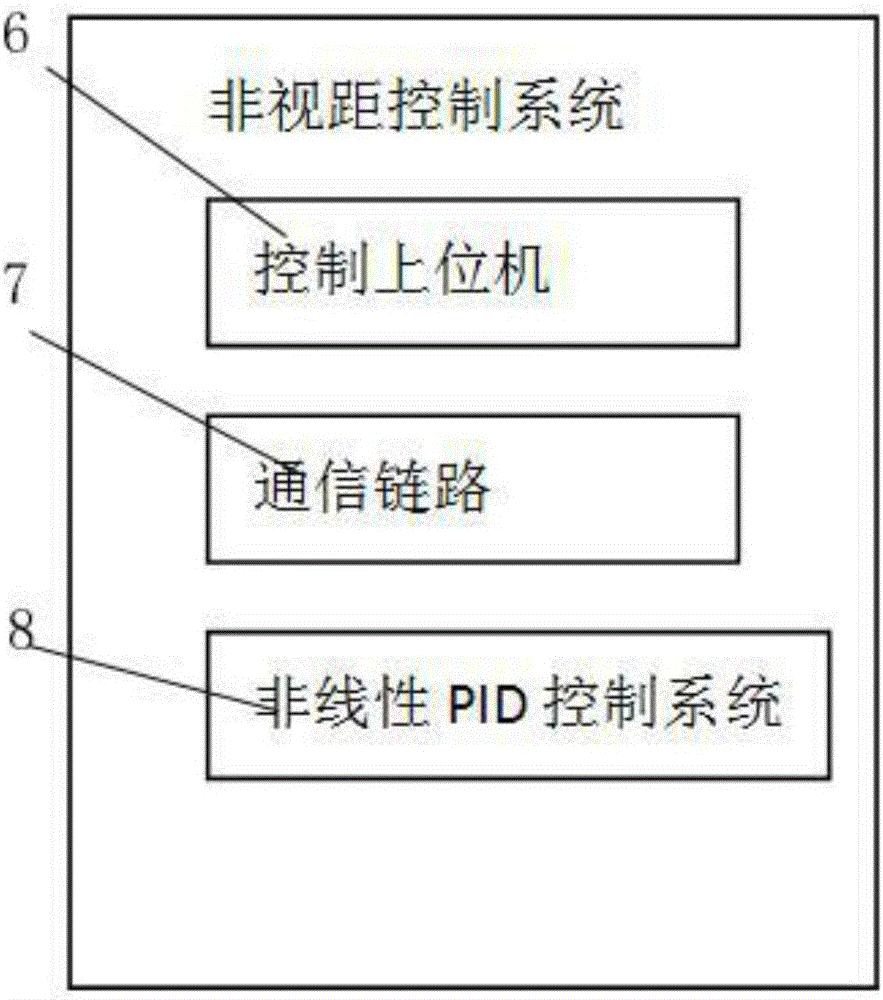
[0037] 5. Water surface floating body base station 6. Control host computer
[0038] 7. Communication link 8. Nonlinear PID control system
[0039] Please refer to figure 1 , figure 1 It is a structural block diagram of an underwater robot non-line-of-sight control system of the present invention. A non-line-of-sight control system for an underwater robot. The non-line-of-sight control system includes a control host computer, a communication link, and a nonlinear PID control system; The orientation of the lower robot is differential; the communication link is located in the middle layer and is used to control the communication ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More