Under-actuated dexterous manual control system based on DSP and FPGA
A control system and dexterous hand technology, applied in the field of machinery, can solve problems such as energy dissipation and unstable system operation, and achieve the effects of rapid response, human-machine friendliness and high reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The present invention will be further described below in conjunction with drawings and embodiments.
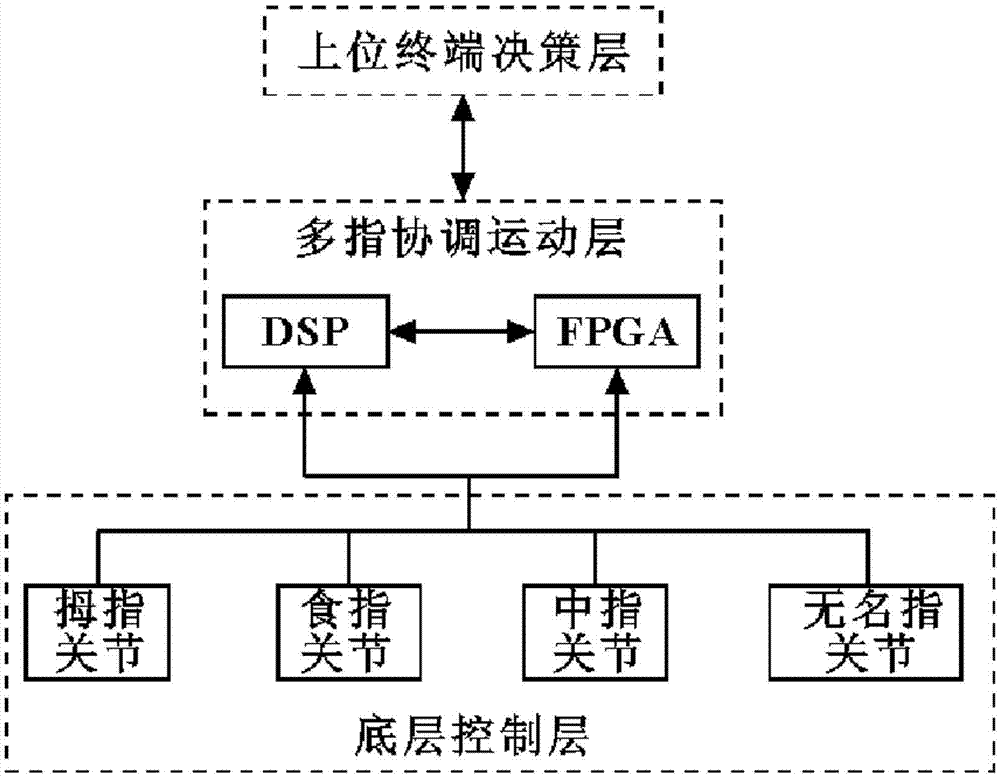
[0020] like figure 1 , the control system adopts a compound hierarchical control architecture combining master-slave control and autonomous control. The whole system consists of three layers, which are the upper computer terminal decision-making layer, the multi-finger coordinated motion layer and the bottom control layer. The upper computer terminal decision-making layer communicates interactively with the multi-finger coordination movement layer through the USB bus, and obtains information such as the collected dexterous hand movement and sensor signals in real time. Planning and automatic adjustment of hand trajectory. The multi-finger coordination movement layer is responsible for the overall collaborative work and information feedback. The bottom control layer is mainly aimed at the motion control of passive joints and the collection of finger pressure informatio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com