

Simultaneous positioning and dense three-dimensional reconstruction method
A 3D reconstruction and dense technology, applied in 3D modeling, image data processing, instruments, etc., can solve problems such as time-consuming and limited operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
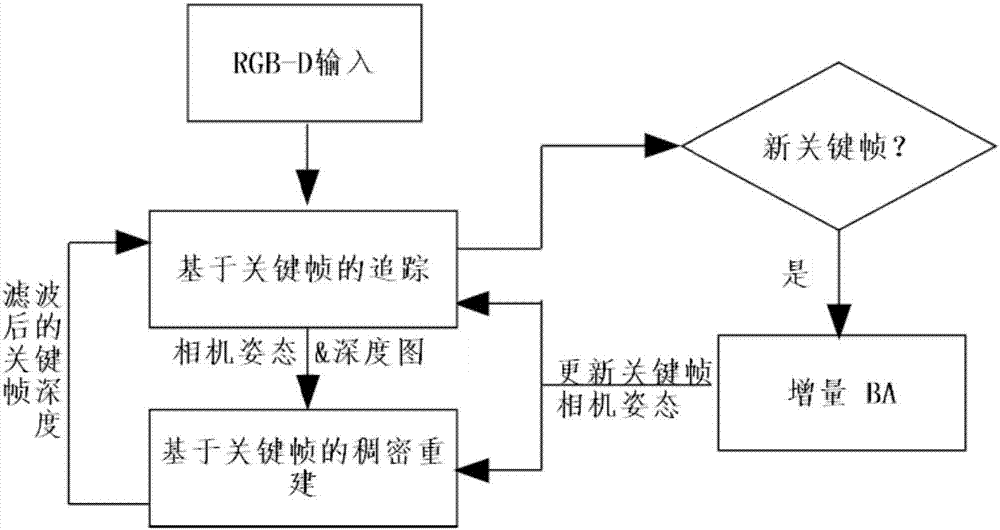
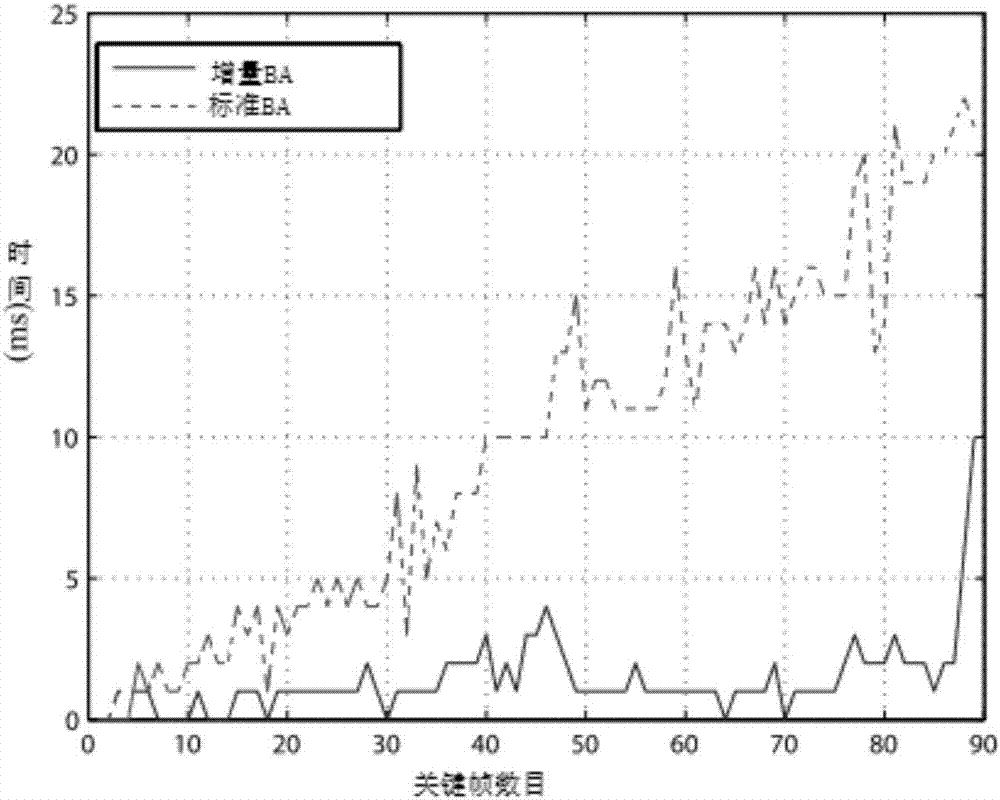
[0087] The system architecture of the present invention is as figure 1 . The camera tracking part of the system and the 3D model reconstruction part run in parallel. For each input frame containing RGB images and depth maps, the camera tracking part firstly combines RGB-D alignment and homography-based feature tracking methods to calculate camera poses to achieve robust camera tracking. Meanwhile, ORB features of keyframes are extracted and matched to detect global loop closure. Finally, incremental BA is periodically run in the background to optimize the camera pose. The reconstruction part fuses the input depth to the depth map of the keyframe when the input frame tracks the camera pose reliably. In order to adjust the dense 3D surface online, the system will de-fuse and re-fuse the keyframes. This strategy makes it necessary to only re-fuse the depth of the keyframes and some additional point clouds when the camera pose is adjusted. Since the number of key frames is li...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More