

Unmanned vehicle intersection detection method based on three-dimensional laser radar
A technology of three-dimensional laser and detection method, which is applied in the direction of radio wave measurement system, instrument, etc., can solve the problems of vehicle positioning deviation, narrow viewing angle, reliability cannot be guaranteed, etc., and achieve the effect of wide application range and strong real-time performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
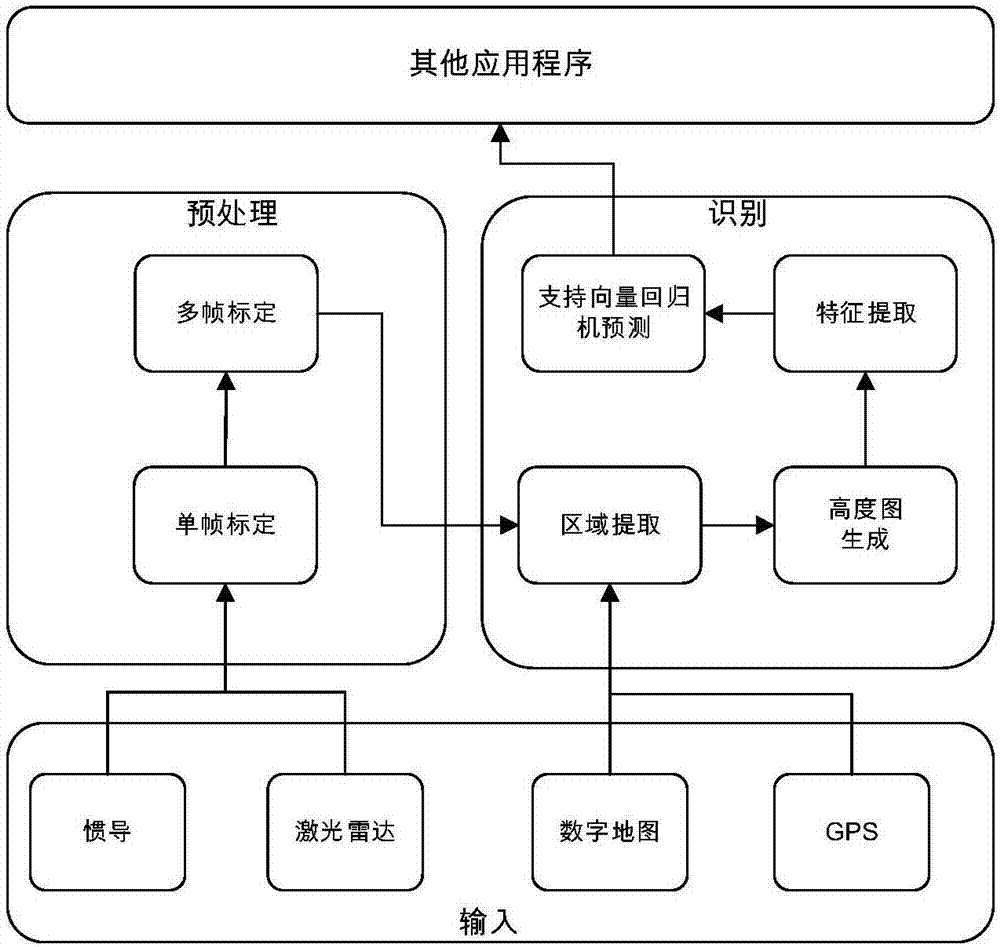
[0043] A 3D lidar-based intersection detection method for unmanned vehicles, based on 3D lidar for intersection detection, uses vehicle pose information, and converts multi-frame point cloud data from the sensor coordinate system to the earth coordinate system, so that it can Acquire accurate 3D scene point cloud images. At the same time, combined with the offline map road network information, real-time matching with the self-driving car position, extracting the intersection in front of the vehicle and its branch road network as prior data, and then extracting the sense of each branch from the 3D point cloud image. area of interest. By interpolating each region of interest to obtain a grayscale image of the terrain height, and then calculating the gradient of the encoded image, the height invariance of different terrains can be achieved. On this basis, using machine learning algorithms to extract multiple features from the gradient image, the position and direction of each ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More