

High-precision indoor positioning method based on MEMS (Micro Electro Mechanical System) inertial sensor
An inertial sensor and indoor positioning technology, which is applied in the direction of instruments, navigation through speed/acceleration measurement, and measuring devices, can solve the problems of inability to initially align and low gyroscope accuracy, and achieve good positioning accuracy, small size, and strong popularity sexual effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] The technical solution of the present invention will be further described in detail below in conjunction with the embodiments and the accompanying drawings.
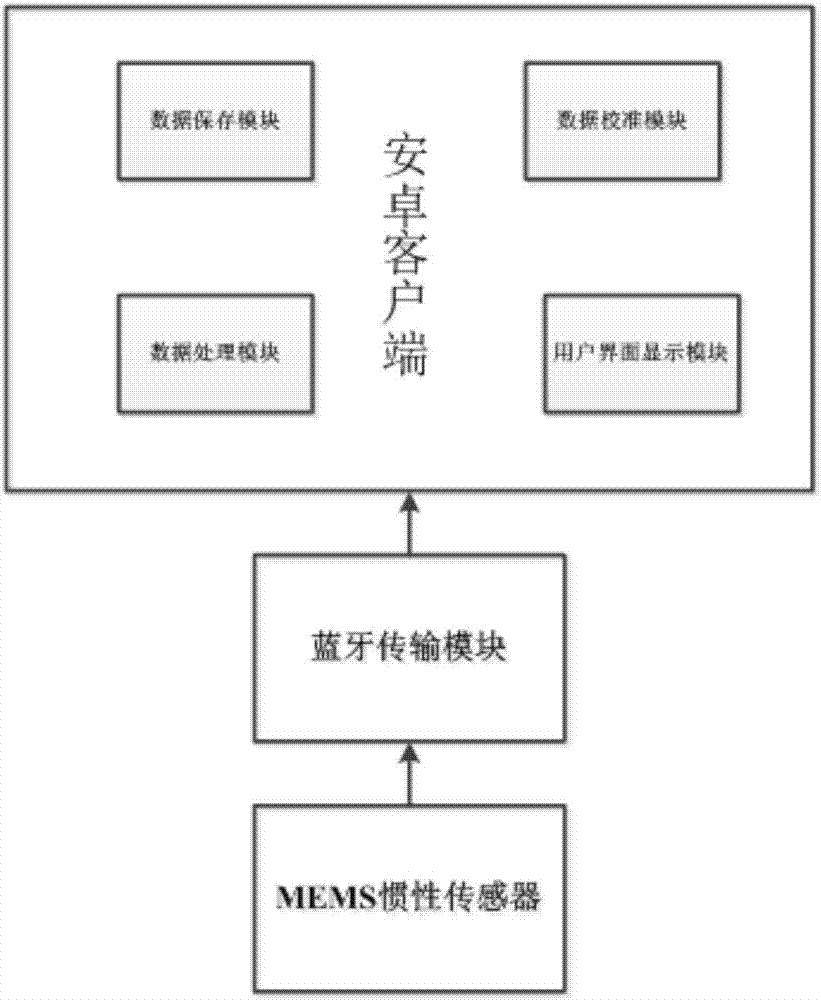
[0046] Such as figure 1 As shown, the high-precision indoor positioning equipment adopted in the present invention includes: low-cost MEMS inertial sensors such as MPU9260, MPU6050, etc., Bluetooth transmission module, android client; wherein, the android client includes a data calibration module, a data storage module, and a data processing module and a user interface display module. The MEMS inertial sensor is firmly connected to the foot, sensitive to the change of the footstep state, and transmits the measured parameters through the Bluetooth transmission module, and receives the data transmitted by the Bluetooth transmission module through the Android client. The Android client first calibrates the three-axis accelerometer, three-axis gyroscope, and three-axis magnetometer through the data calibration module...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More