

Uniformly controlled multifunctional unmanned aerial vehicle group
A technology of unmanned aerial vehicles and machine groups, applied in the field of unmanned aerial vehicles, can solve the problems of low equipment cost, operator fatigue, and correspondingly increased requirements, so as to save labor costs, extend the working radius, and improve battery life. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
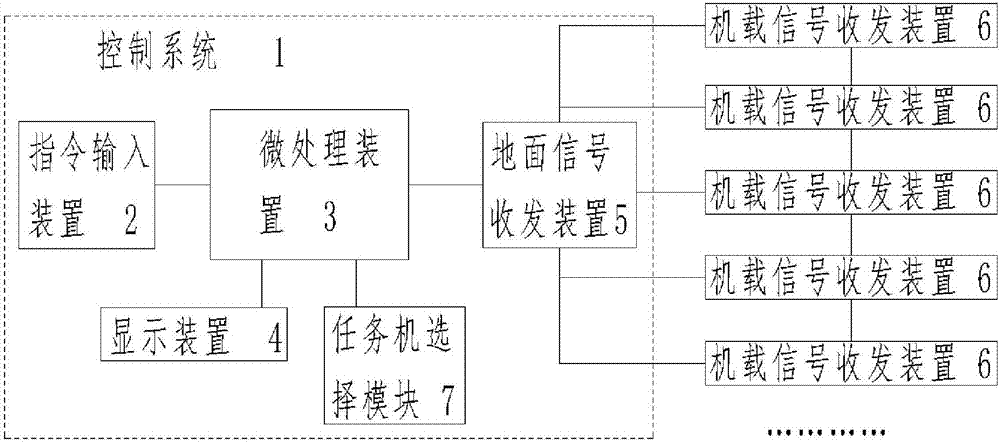
[0073] According to the unified control multifunctional unmanned aerial vehicle group provided by the present invention, wherein there are 20 unmanned aerial vehicles, the unmanned aerial vehicles are all purchased from Shenzhen Dajiang Innovation Technology Co. Xinjiang drone components and self-assembly, multiple drones are numbered with Arabic numerals, numbered 1-20, and the working device on the drones numbered 1-4 is an altimeter, numbered 5- The working device on the UAV of 8 is a thermometer, the working device on the UAV numbered 9-12 is a camera, and the working device on the UAV numbered 13-16 is a barometer, numbered 17-20 The working device carried on the UAV is a GPS receiver;
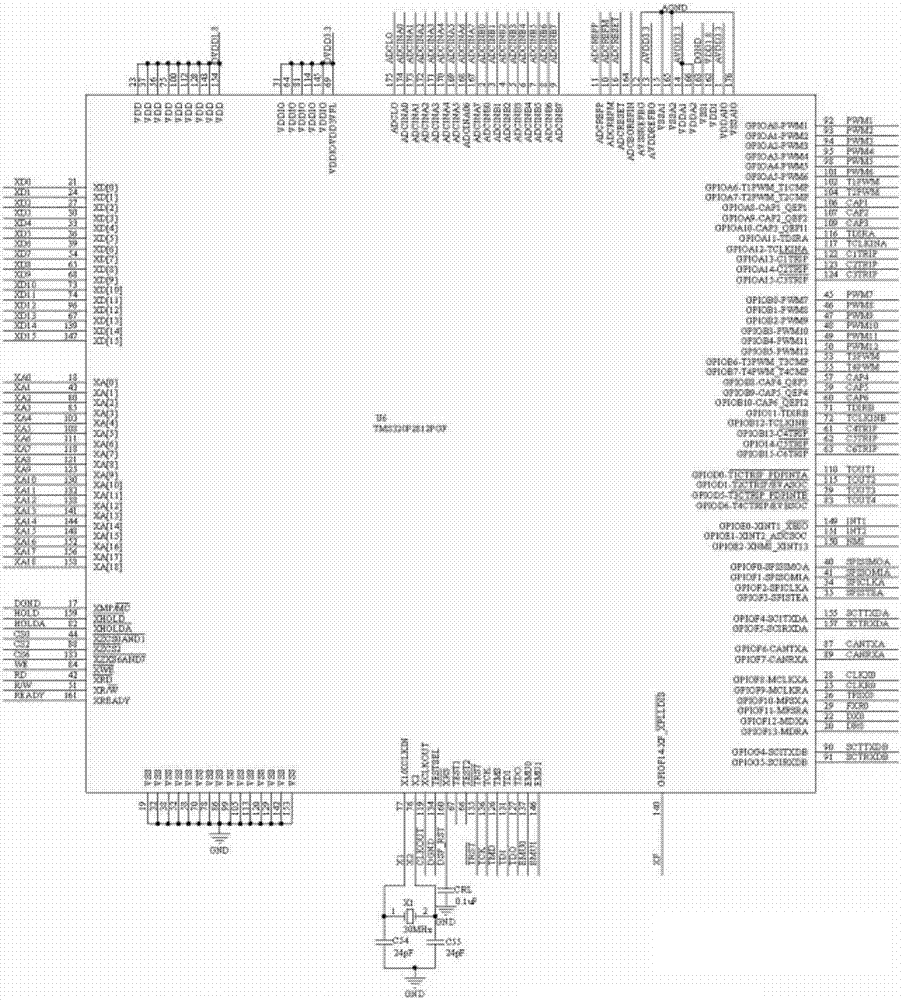
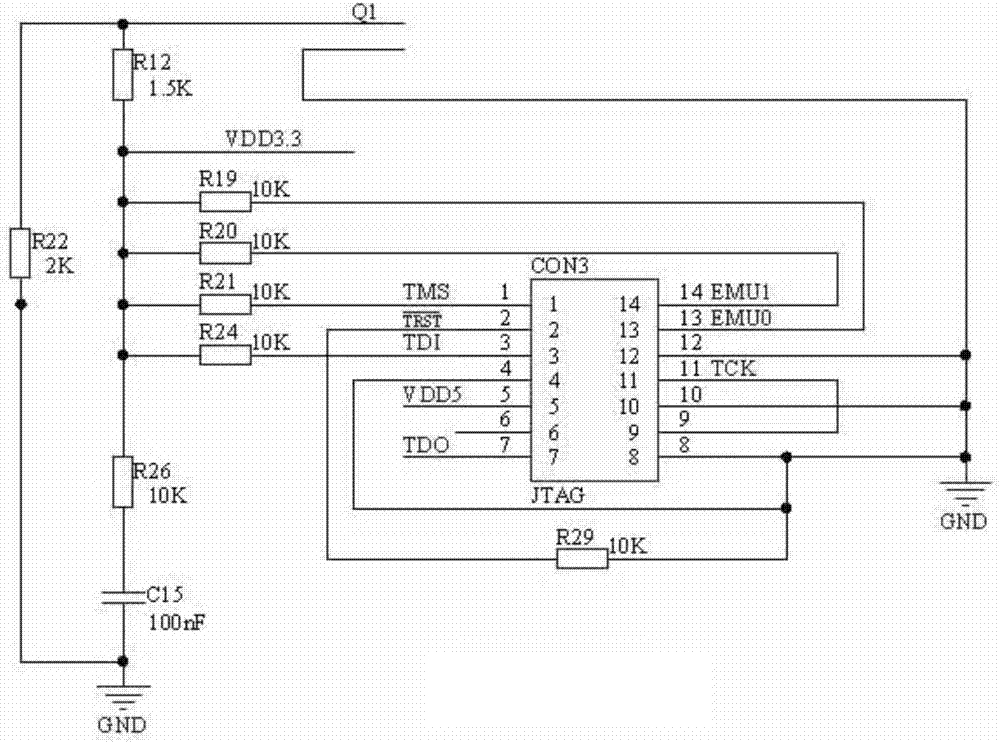
[0074] The micro-processing device in the ground station of the UAV group selects a DSP chip with a model of TMS320F2812 and a matching JTAG development interface circuit and external flash memory. The circuit diagram of the DSP chip with the model TMS320F2812 is shown in detail. figure...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More