

HOG (Histogram of Oriented Gradient) and Mean Shift algorithm-based indoor pedestrian detection and tracking method
A pedestrian detection and algorithm technology, which is applied in computing, computer parts, character and pattern recognition, etc., can solve the problems of Nao robot, such as limited field of vision, inability to detect, and various postures, so as to achieve good reference value, good practicability, Good real-time and robust effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
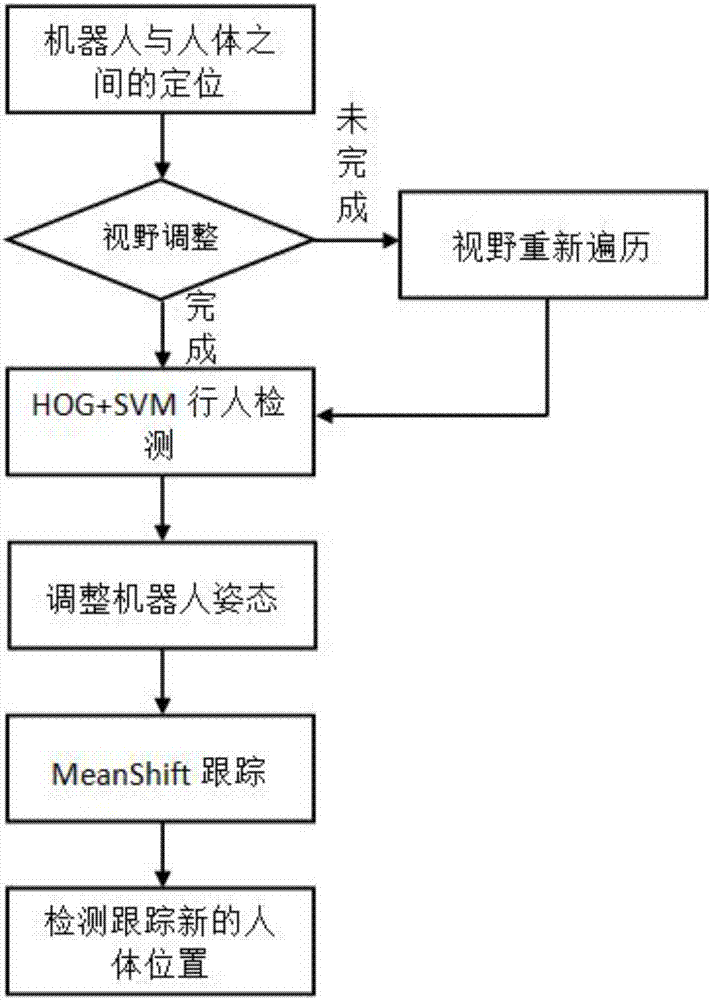
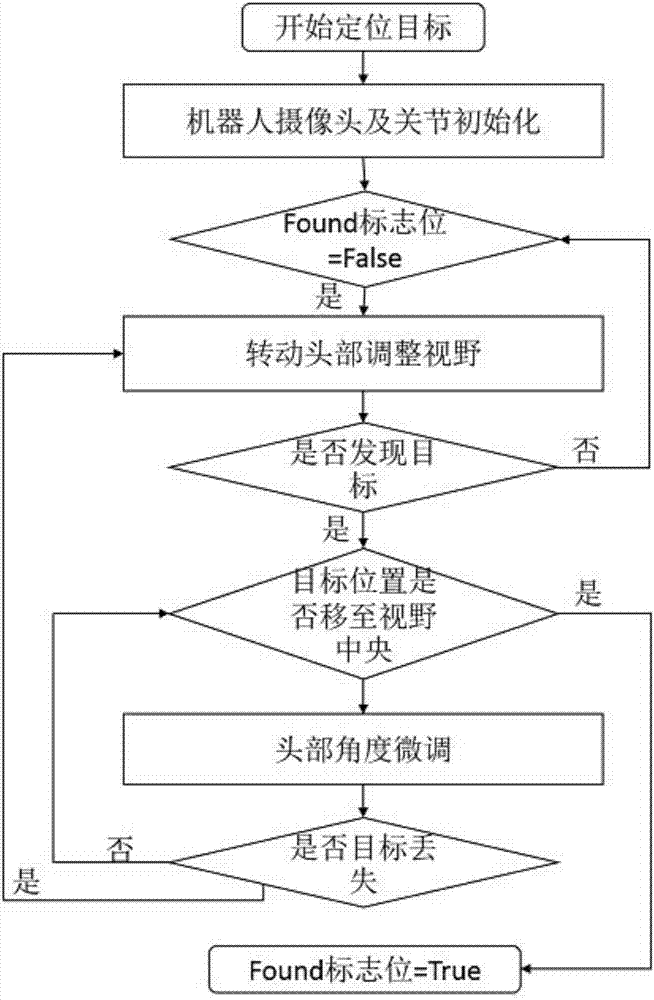
[0037] figure 1 It is the overall architecture diagram of the system. The principle is to connect the computer and the robot through the Chrograph software first. After the connection is successful, the robot is in a rigid state. It will adjust the joints in time and traverse the field of view that can be observed. Move the observed human body to the center of the robot's field of view for easy detection. Then calculate the distance between the robot and the human body to locate the target. Then the human body is detected through the HOG+SVM algorithm. At this time, the detected human body image will be framed out in time. When the human body moves, the improved key will be triggered, then the video sequence will be recorded, and then converted into an image of each frame, and then the human body in the image will be detected one by one, and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More