

Method for understanding and tracking control of three-dimensional path of under-actuated autonomous underwater vehicle
An underwater vehicle, tracking control technology, applied in non-electric variable control, vehicle position/route/altitude control, altitude or depth control, etc. Easy to transplant and engineering application, safe and reliable processing method, good robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0062] Method of the present invention mainly comprises the steps:
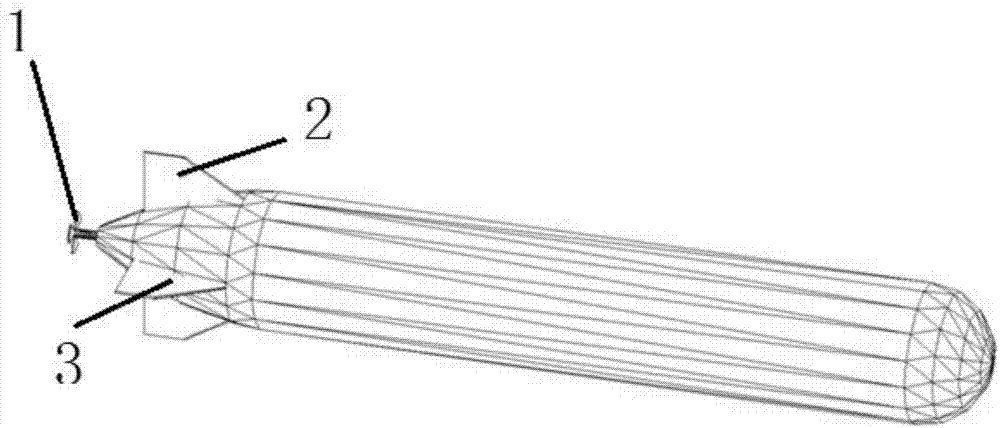
[0063] Step 1: Uniform discretization of the three-dimensional path, the three-dimensional path represented by the analytical form or the three-dimensional path of the point sequence is interpolated by cubic B-spline, and discretized into a uniform point sequence p′={p′ 0 ,p′ 1 ,p′ 2 ,...,p′ Q}, it is considered that the original three-dimensional path can be connected end-to-end by the straight line segments formed by two adjacent points of the point sequence to form a straight line segment sequence l={l 0-1 , l 1-2 , l 2-3 ,...,l i-i+1 ,...,l Q-1-Q}express;
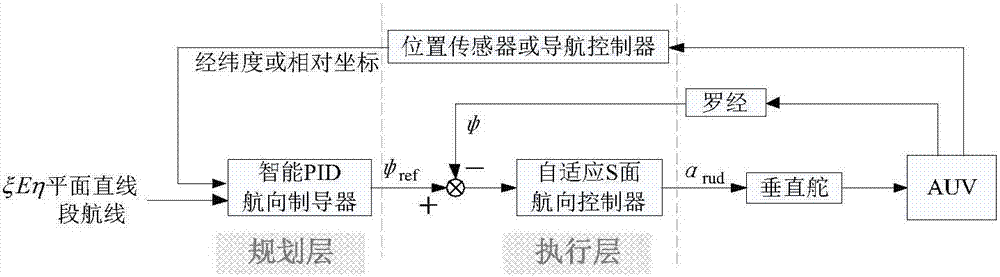
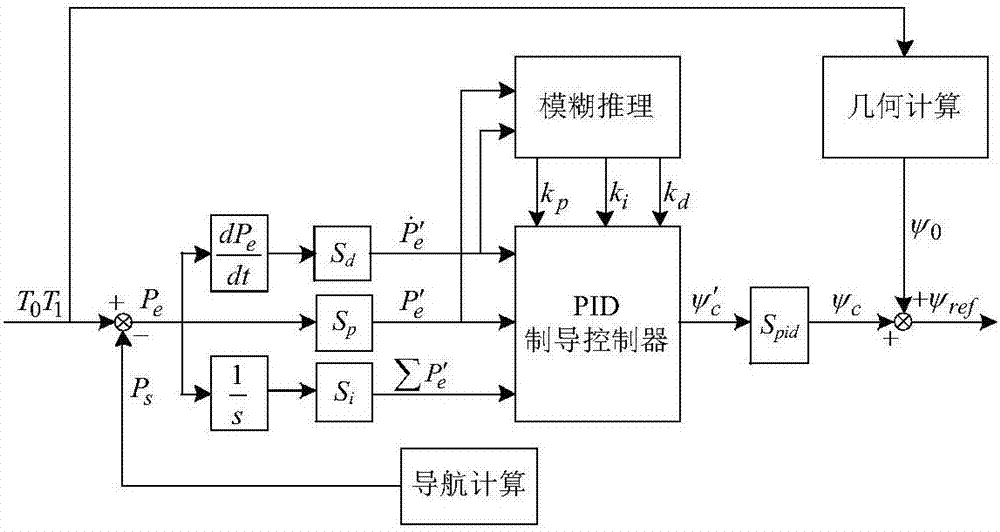
[0064] Step 2: Coordinate projection of the target straight line segment, describing the space straight line segment as the target straight line segment, that is, the current unique target route of the AUV. According to the decoupling control theory of weak maneuvering bodies, coordinate projection is performed on the target straight line segmen...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More