

Space robot active-disturbance-rejection coordination control method based on expansion state observation and compensation
A space robot and coordinated control technology, applied in the direction of program control, general control system, control/regulation system, etc., can solve problems such as limited capacity of spaceborne computer and uncertain parameters
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
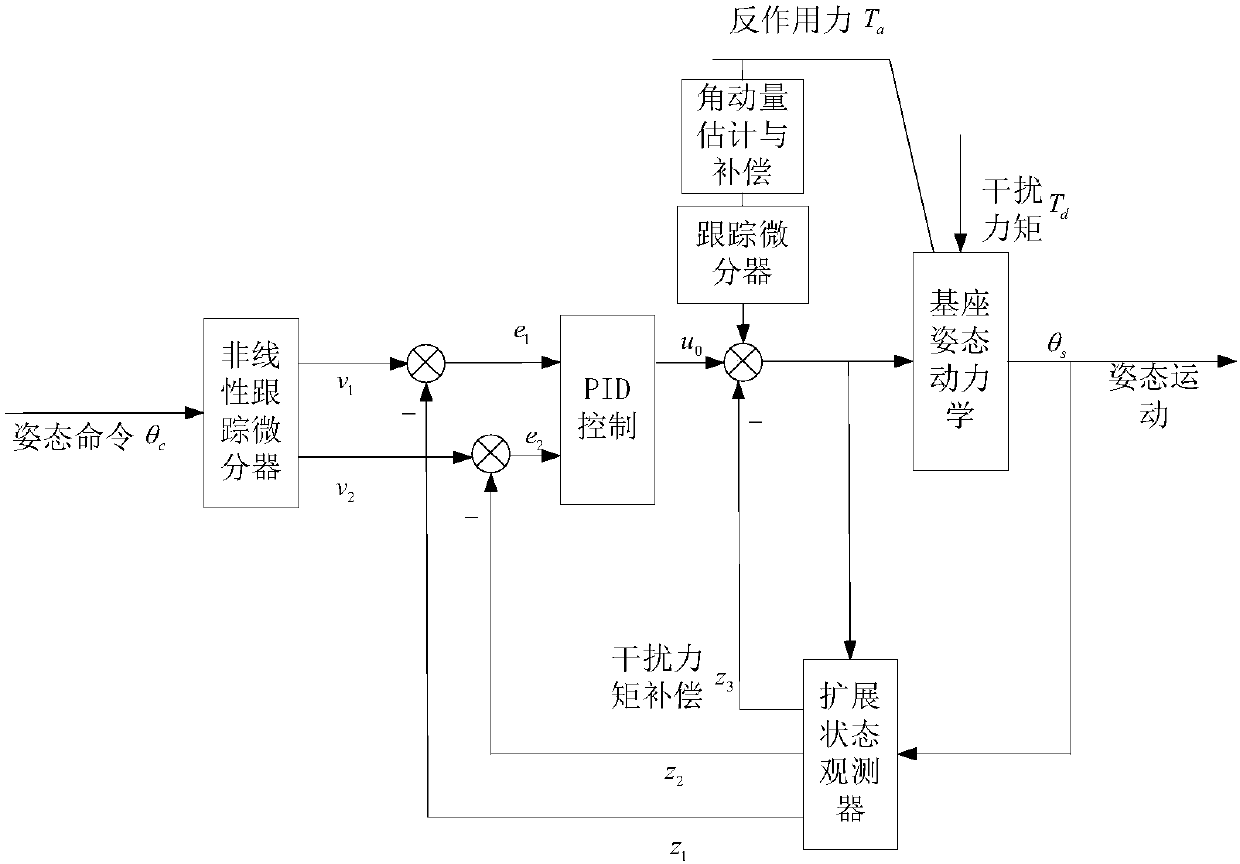
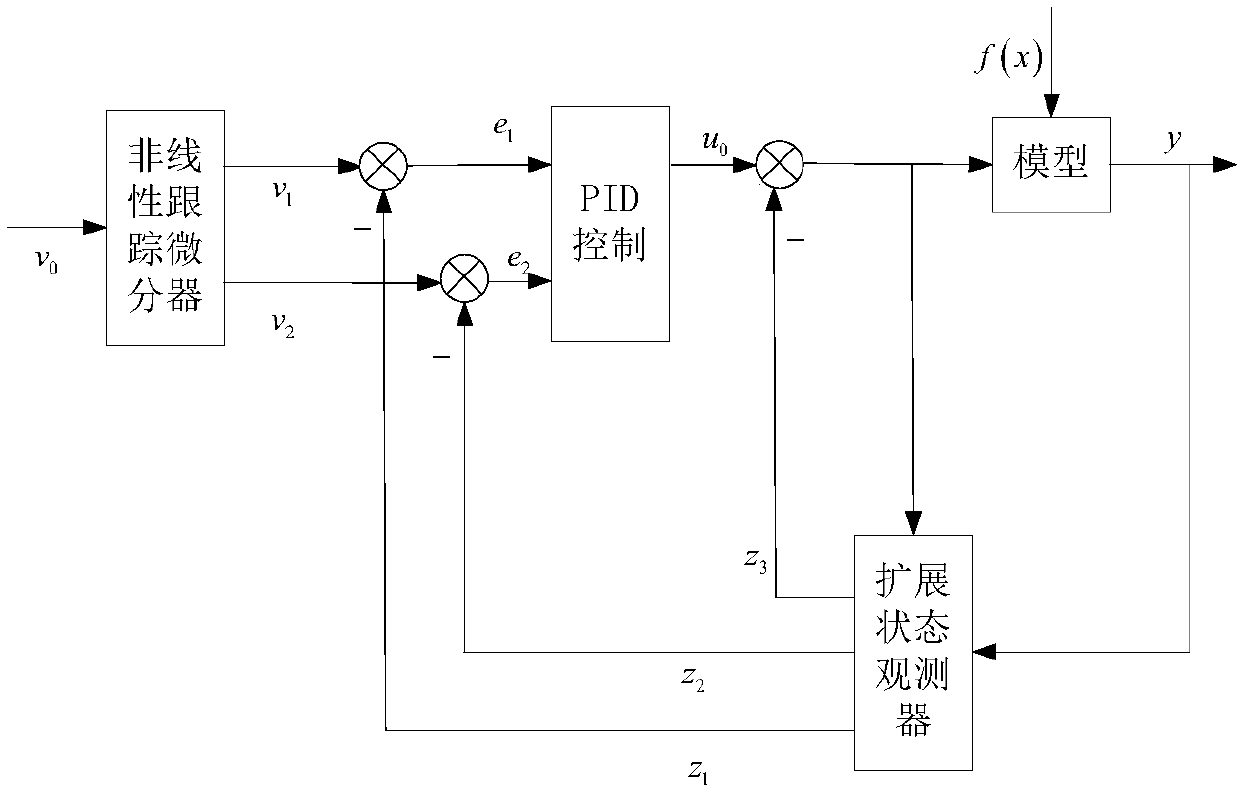
[0144] to combine figure 1 , figure 2 , image 3 To illustrate this embodiment, by figure 1 It can be seen that the control law includes three parts, step 1 to step 3: the angular momentum of the manipulator movement is estimated by establishing the space robot mathematical model and the angular momentum expression, and the disturbance torque generated by the manipulator movement is estimated by tracking the differentiator, and then As a compensation control torque; Step 4: Compensate the disturbance torque due to the existence of uncertainty by expanding the state observer; Step 5: Deduce the PID control law by the difference between the expected attitude command and the real-time attitude information.
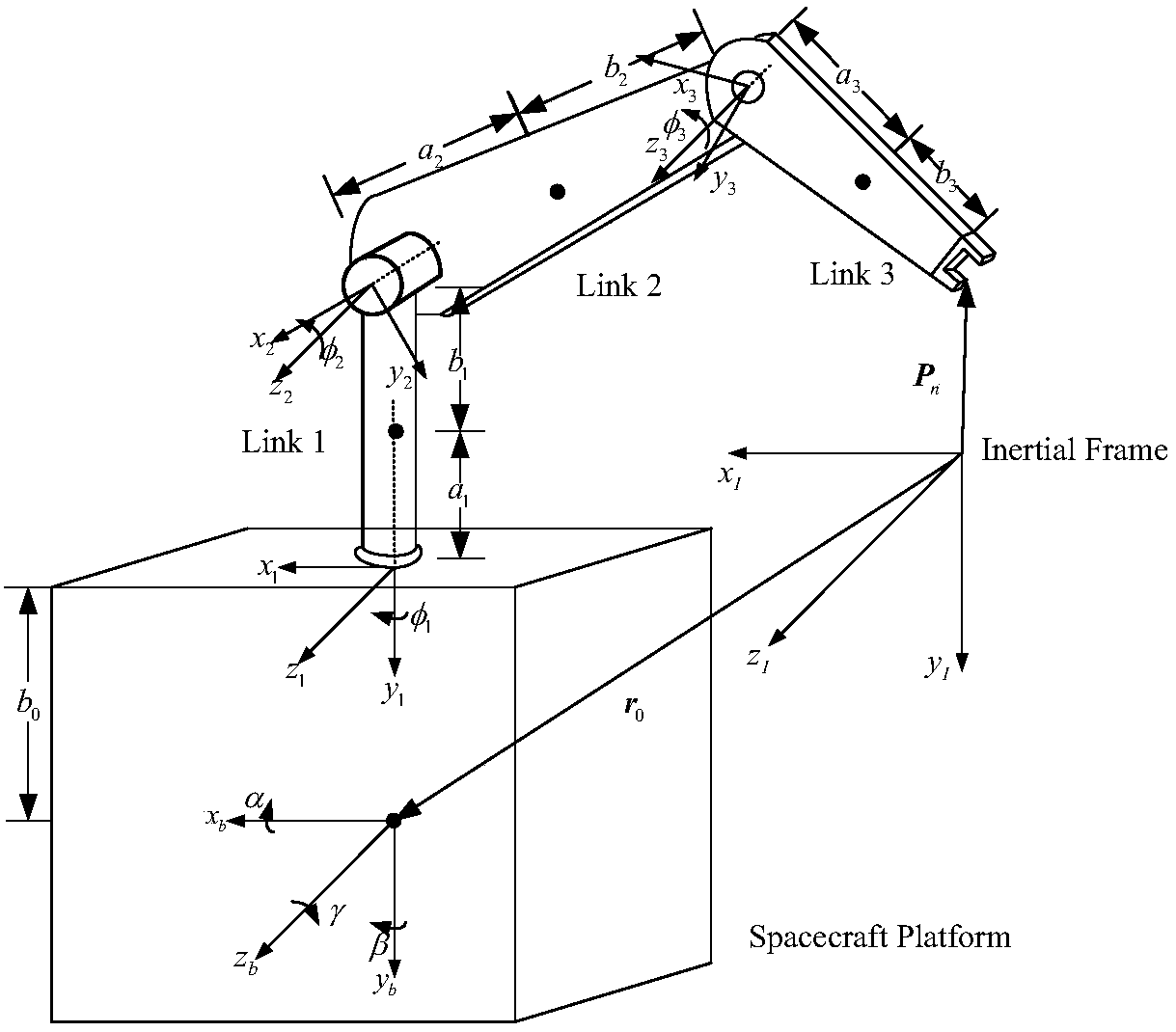
[0145] pass image 3 It can be seen that the space robot is composed of a three-degree-of-freedom rotating sub-manipulator and a satellite base. The movement of the manipulator will make the space robot base deviate from the roll, pitch and yaw axes. The quality paramete...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More