

Interactive multi-model radar target tracking method based on predicted value measurement conversion
A radar target tracking and interactive multi-model technology, which is applied in the directions of measuring devices, radio wave measurement systems, radio wave reflection/reradiation, etc., can solve problems such as not considering the maneuvering characteristics of the tracked target
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
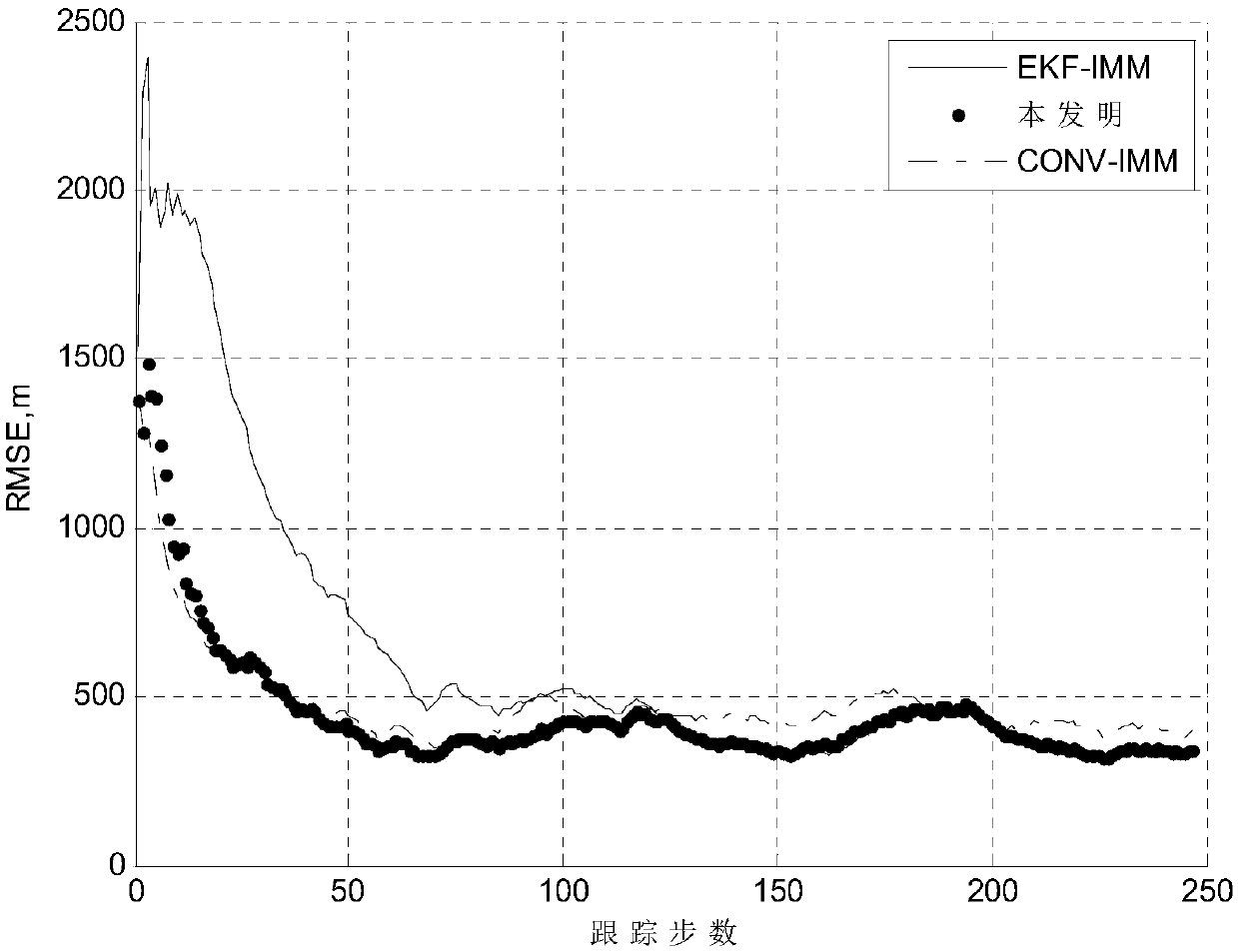
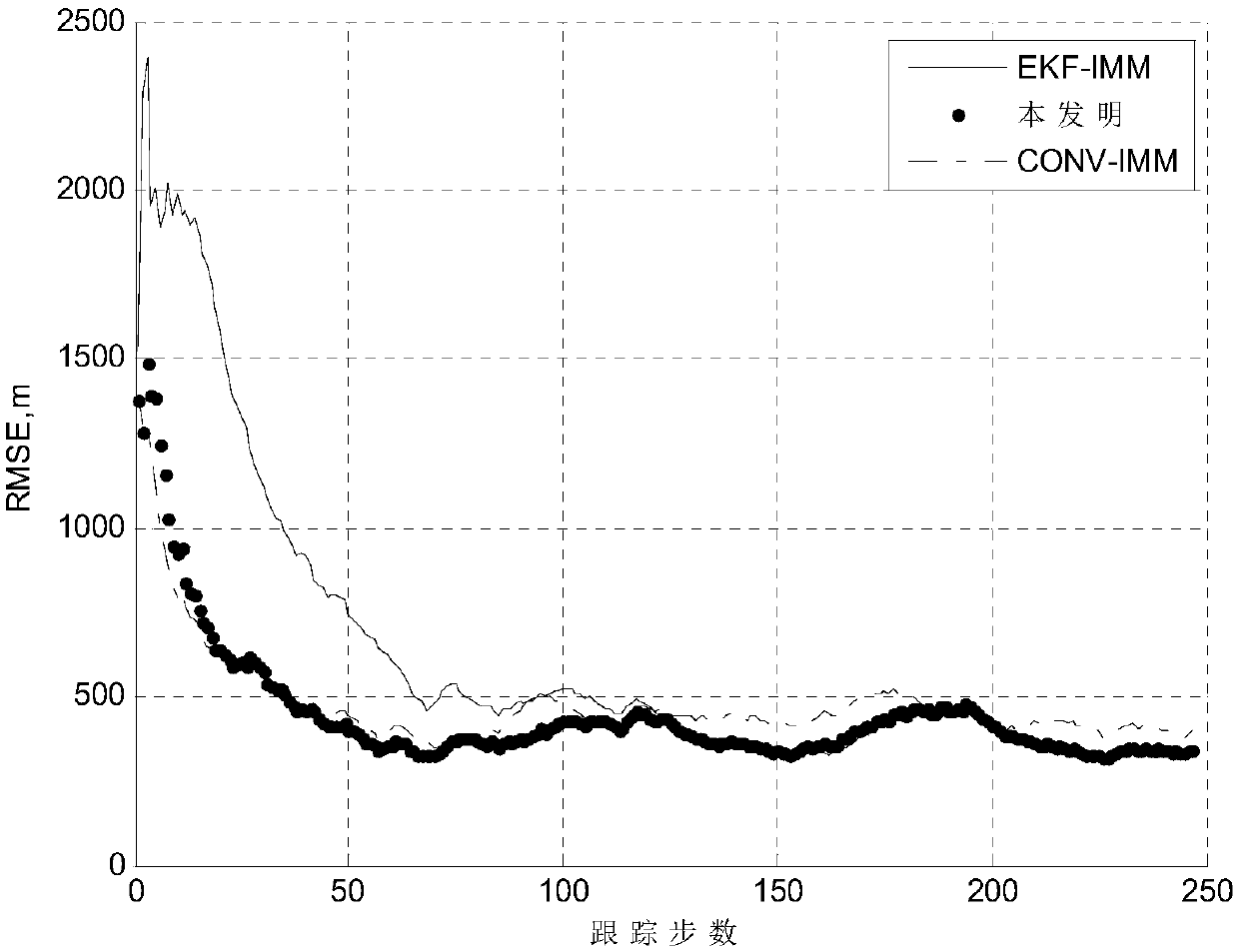
[0082] Embodiment 1: The distance measurement error of the sensor is 3m, the measurement error of the azimuth angle is 1 degree, and the measurement error of the pitch angle is 0.5 degree.
Embodiment 2
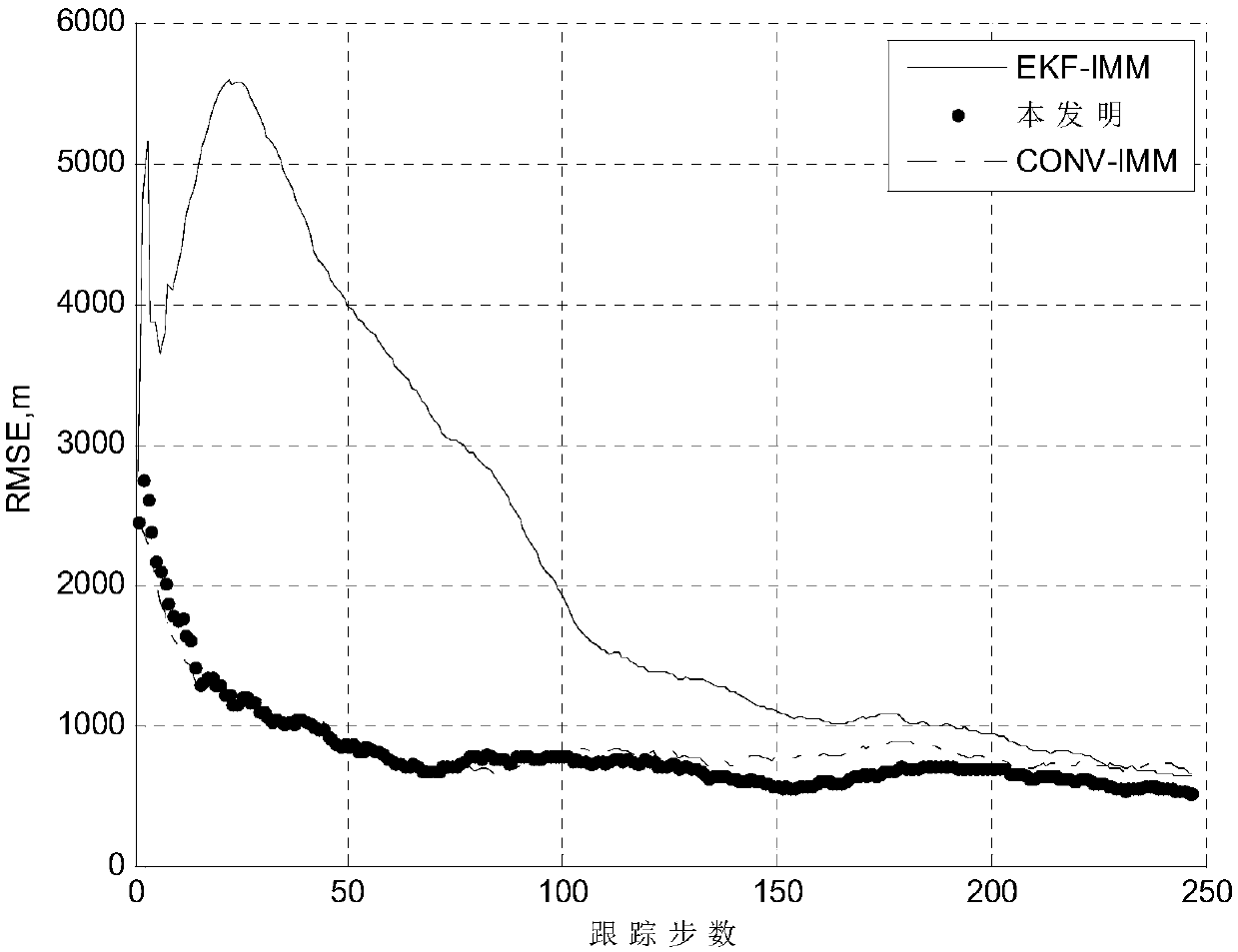
[0083] Embodiment 2: The distance measurement error of the sensor is 3m, the measurement error of the azimuth angle is 1.5 degrees, and the measurement error of the pitch angle is 1.2 degrees.
[0084] In the above two embodiments, the DUCM-IMM algorithm is used to realize target tracking, and the interactive multi-model method (CONV-IMM) and EKF-IMM algorithm based on traditional measurement conversion are used at the same time to compare their tracking performance. All algorithms use the same target initial state and its estimated error covariance matrix in the simulation process. The target tracking performance index is the RMSE value, which is defined as follows:
[0085]
[0086] in and are the state estimation errors in the x-direction and y-direction during the i-th Monte Carlo simulation, respectively, and N is the Monte Carlo number. The smaller the value of RMSE, the higher the tracking accuracy of the algorithm.
[0087] By comparing the above simulation re...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More