

Multipurpose six-legged robot remote control system based on Xtion device
A remote control system and hexapod robot technology, applied in the field of robotics, can solve the problems of inability to calculate its own displacement, poor real-time performance, poor versatility, etc., and achieve the effects of strong portability, improved accuracy, and easy operation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The present invention will be described in detail below in conjunction with the accompanying drawings and implementation examples.
[0037] The present invention is a remote control system of a multifunctional hexapod robot based on Xtion equipment, which is used to realize positioning, navigation, motion design, gesture recognition control, voice recognition control, and wireless communication of the hexapod robot equipped with Xtion equipment. connect.
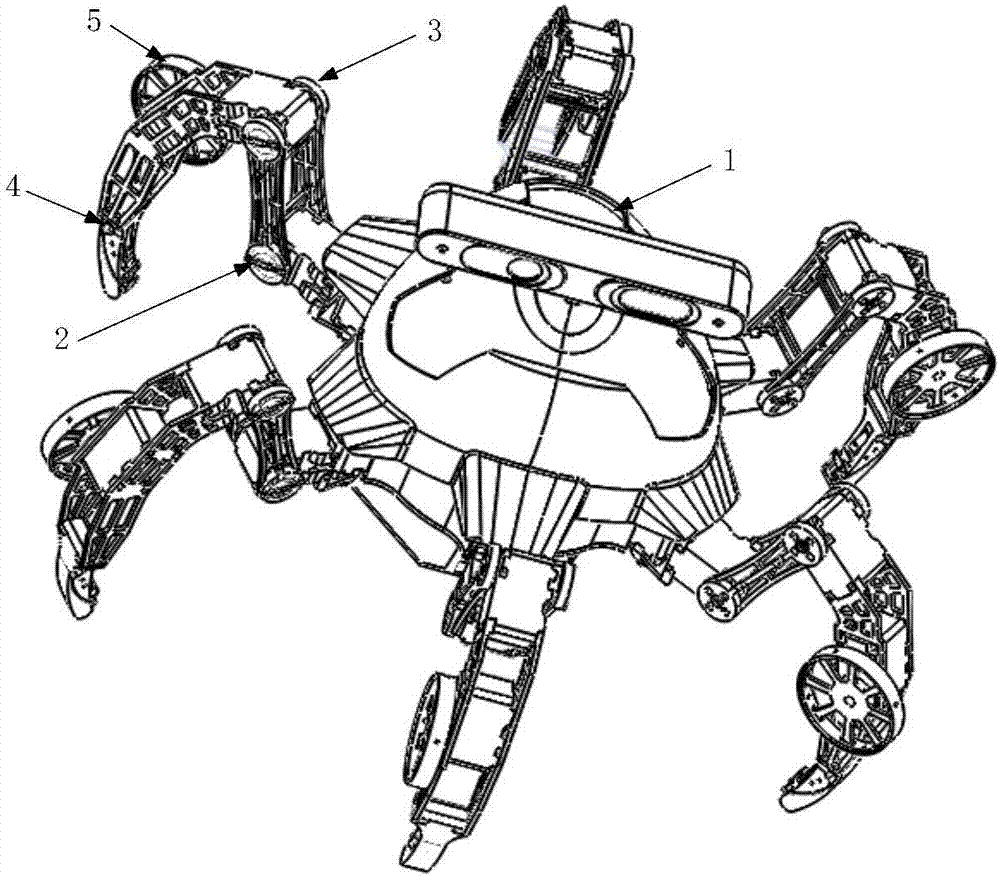
[0038] The body 1 of the above-mentioned hexapod robot has six legs evenly distributed in the circumferential direction, and each leg has three joints, namely: hip joint 2, knee joint 3 and ankle joint 4, and each joint is driven to rotate by the driving servo, such as figure 1 As shown; and the legs of the hexapod robot are equipped with wheels 5, through the control of each joint in the process of moving, the hexapod robot can switch between the wheel row and the leg row according to the terrain during the moving pr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More