

Robot automatic scanner and scanning method thereof
A scanning method and automatic scanning technology, which is applied in the direction of instruments, measuring devices, optical devices, etc., can solve the problem of low model accuracy, achieve the effects of improving measurement accuracy, high-precision scanning, and solving dependencies
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
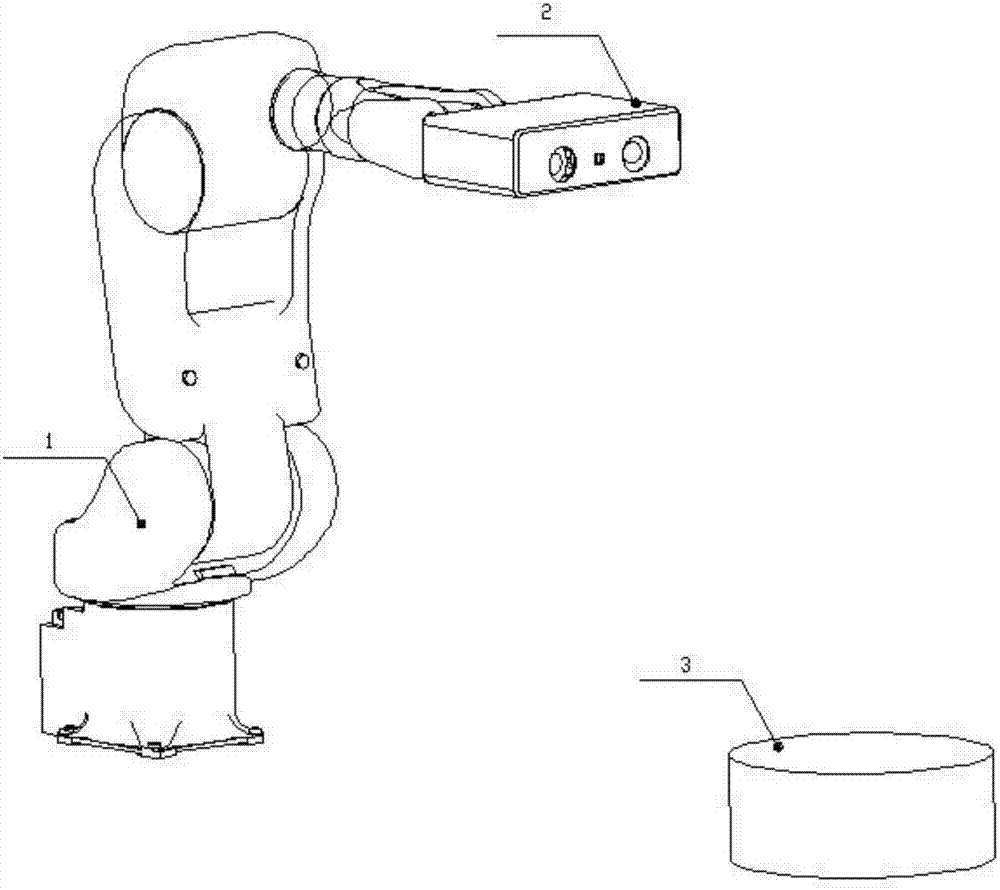
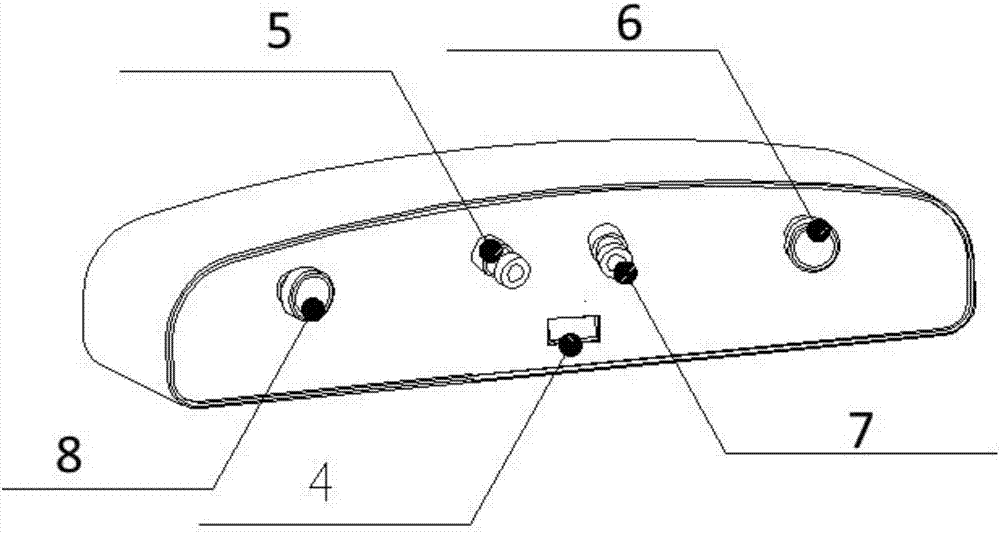
[0023] Such as figure 1 As shown, a robot automatic scanning device includes a six-axis robot arm, a MEMS scanning galvanometer laser three-dimensional measuring head, and a turntable. Such as figure 2 As shown, the MEMS scanning galvanometer laser three-dimensional measuring head is mainly composed of a projector, the A-mode binocular camera is the first camera and the third camera, and the B-mode binocular camera is composed of the second camera and the fourth camera. The scanning probe is placed At the end of the six-axis robotic arm. The B-mode binocular camera is used to measure the surface of the object with low precision, obtain all the point cloud data of the object and plan the measurement path for it. The A-mode binocular camera is used to measure the surface of the object with high precision along the planned measurement path.
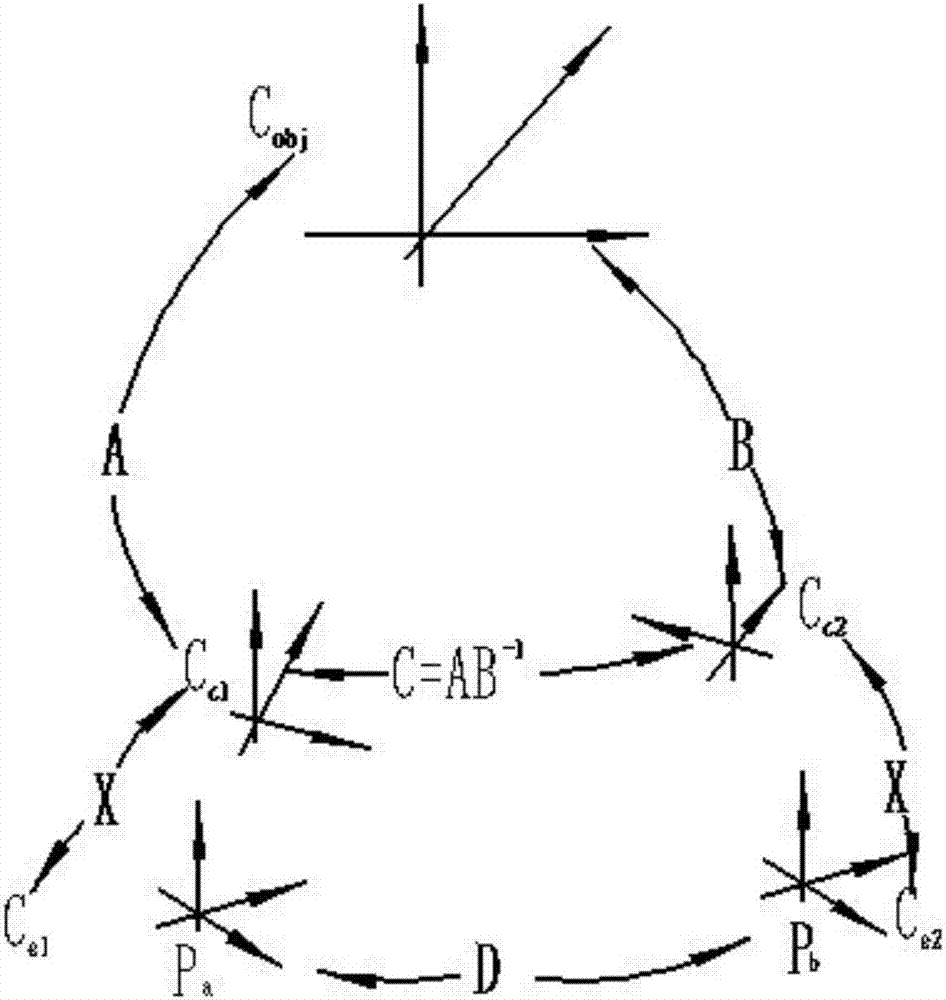
[0024] Attached below figure 2 with image 3 The present invention is described in detail.
[0025] A method for automatically scan...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More