

A method to improve the control performance of repetitive compensation pid control system
A control performance and control system technology, applied in the field of PID control, can solve problems such as increased debugging time of stable loops, achieve the effects of improving tracking accuracy and response time, reducing adjustment difficulties, and increasing adjustment variables
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
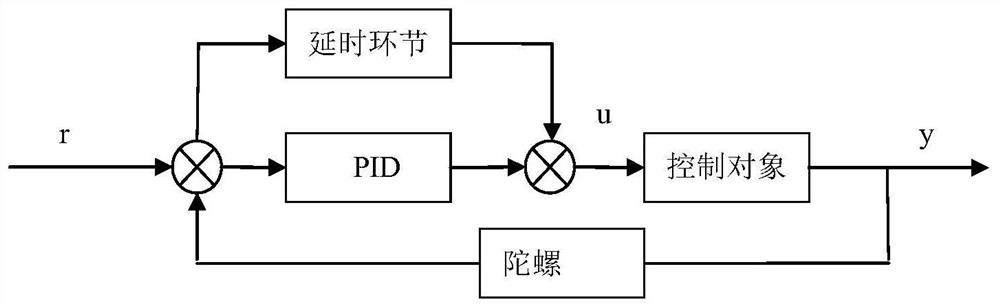
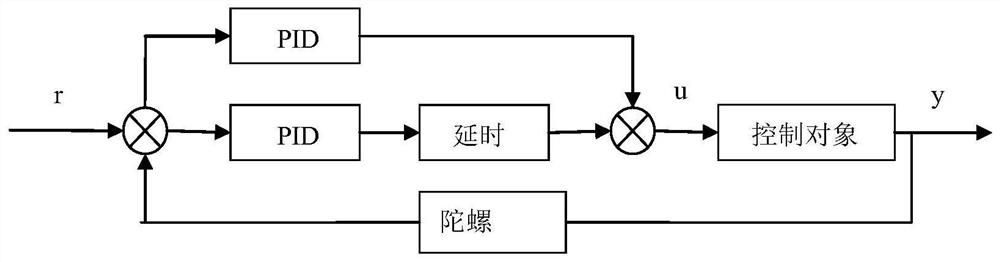
[0036] Aiming at the shortcomings of conventional PID control method for DC servo system, long adjustment period of parameters and difficulty in improving system accuracy, the present invention proposes a PID control scheme based on repetitive compensation. This scheme improves on the repetitive compensation control structure. The improved control scheme not only guarantees the system performance index, but also shortens the parameter adjustment cycle and improves the accuracy of the system to isolate disturbances.
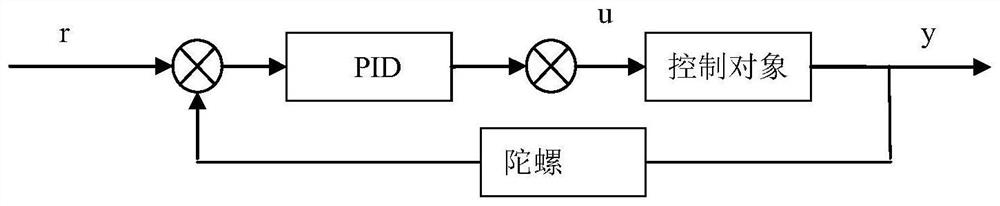
[0037] The control scheme provided by the invention has a relatively good application prospect in the seeker optical cabin. In this embodiment, the DC motor of a certain optical cabin is used as the control object, such as figure 2 As shown, the system uses gyro-sensitive control object's current position for feedback. The input of the PID controller is the difference between the given amount r and the feedback amount y of the control object, and the difference...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More