

Two-rotation and two-movement structural redundancy parallel mechanism
A redundant and parallel technology, applied in the field of robotics, can solve problems such as inability to overcome singular positions and limit the application of mechanisms, and achieve the effects of easy production and processing and simple mechanism structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The following are specific embodiments of the present invention and in conjunction with the accompanying drawings, the solutions of the present invention will be further described.
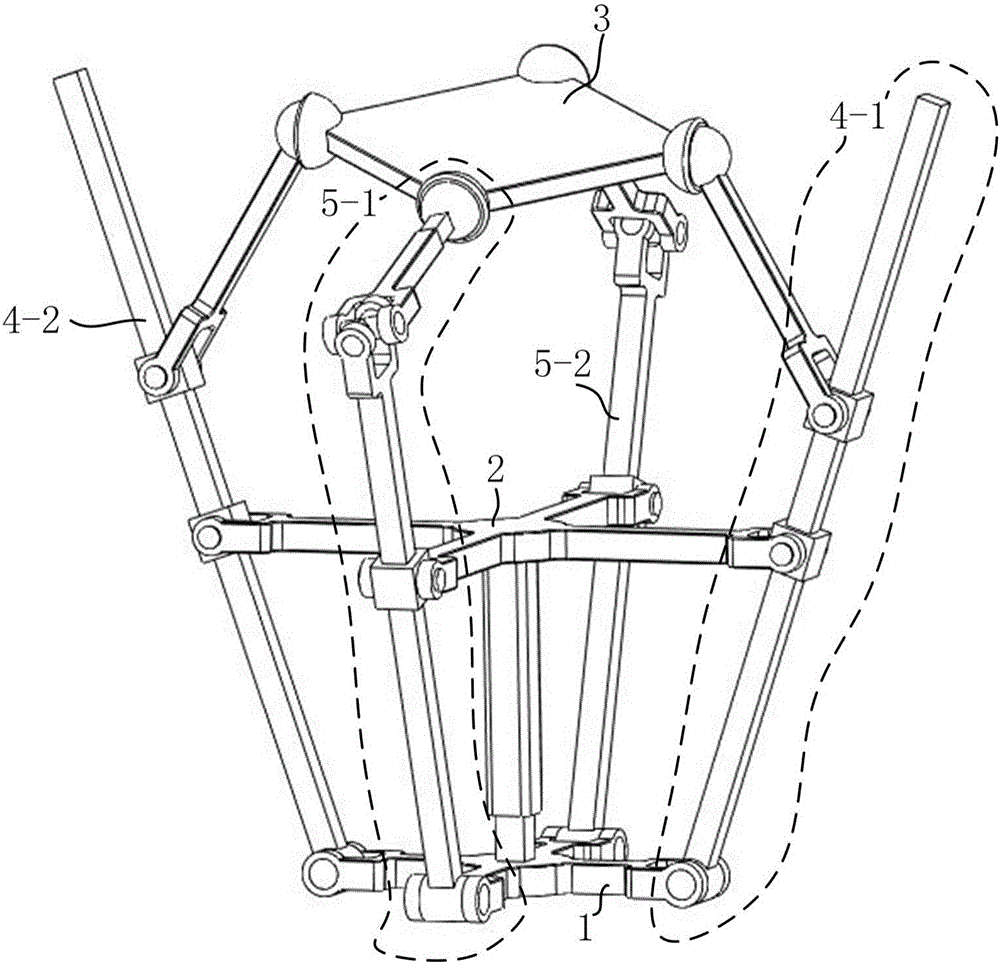
[0022] Such as figure 1 Shown is a four-degree-of-freedom parallel robot mechanism with structural redundancy. The parallel robot mechanism includes: a fixed platform 1, four branch chains (4-1, 4-2, 5-1, 5-2), and a central platform 2 , moving platform 3. The four branch chains are evenly distributed between the moving platform and the fixed platform at intervals of 90°.
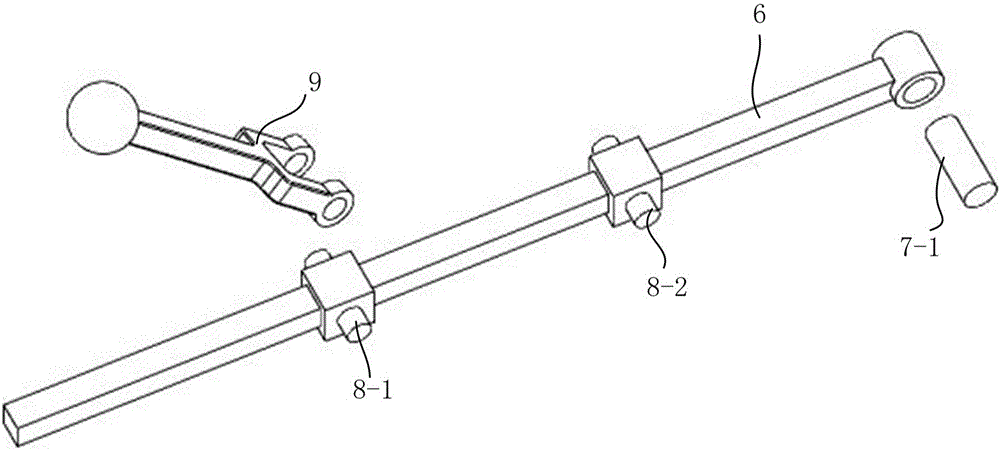
[0023] The first type of branch chains (branch chains 4-1, 4-2) include: sliders (8-1, 8-2), ball auxiliary rods 9, link rods 6, and pins 7-1.
[0024] The connection between the parts constituting the first type of branch chain: two sliders are nested in the connecting rod to form a moving pair, the upper slider 8-1 is connected with the ball auxiliary rod 9 to form a rotating pair, and the ball auxiliary rod passes t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More