

Welding robot cosmetic welding on-line tracking method based on laser sensor
A laser sensor and welding robot technology, applied in welding equipment, arc welding equipment, manufacturing tools, etc., can solve the problems of laser tracker limitation, complex surface topography, and unobvious weld bead characteristics, so as to improve tracking accuracy , Solve the problem of welding path deviation and avoid the effect of laser online tracking error
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0021] In this embodiment, an online tracking method for welding robot cover welding based on a laser sensor, the online tracking method includes the following steps:
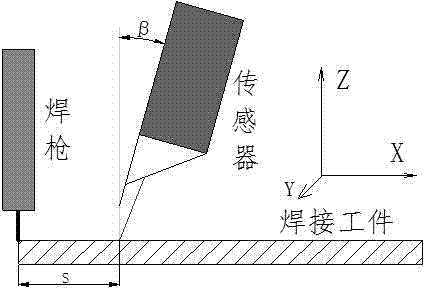
[0022] (1) Install the welding torch and laser sensor on the robot, start the laser sensor after the installation is complete, project the laser scanning beam, adjust the midpoint of the laser scanning beam of the laser sensor to the vicinity of the weld, and ensure that the laser scanning beam is ahead of the welding torch along the welding path 10cm at the end, so that the weld seam has been pre-scanned by the laser sensor before welding;
[0023] (2) Select 2 pieces of 500mm×300mm steel plate as the workpiece to be welded by the robot cover welding. The thickness of the workpiece is 20mm, the material is A-grade steel, and the butt bottom welding is completed; then the zero point calibration of the robot is performed, and the zero point is calibrated for each axis , you can specify a reference value, such as...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More