

A bionic mechanical hand based on mesh linkage structure
A technology of bionic machinery and palm, applied in the field of bionic mechanical palm based on mesh linkage structure, can solve the problems of complex internal structure, high cost, high manufacturing cost, etc., and achieve the effect of improving reliability, reducing cost and improving performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
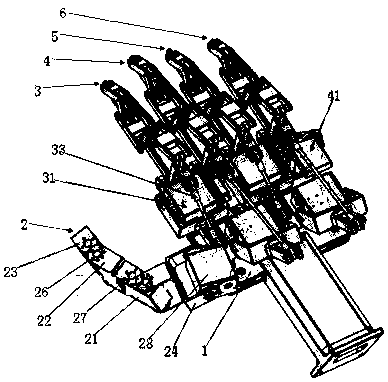
[0037] A bionic mechanical palm based on a meshed linkage structure includes thumb 2, index finger 3, middle finger 4, ring finger 5, little finger 6, and palm 1.
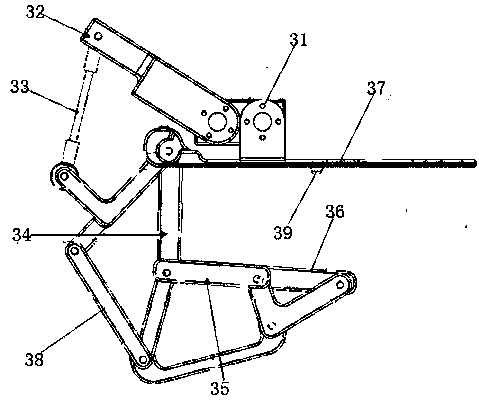
[0038] The index finger 3 is composed of three knuckles, and the whole index finger is in a mesh structure viewed from the side. The entire index finger is controlled by a servo motor 431 through a connecting shaft 33. After the servo motor 31 pushes the connecting rod 33, the knuckle 34 of the index finger 3 closest to the palm 1 will bend first. After touching an obstacle, the knuckle will be automatically locked, and the adjacent knuckles will be at the center of the connecting rod 33. Driven to continue to wrap the obstacle, when the obstacle is touched again, the knuckle will be automatically locked, and the last knuckle, knuckle three 36, will be driven by the connecting rod 33 to complete the same steps in the same way to complete the obstacle It can wrap all objects in all directions, and can adapt to obstacle...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More