

A path planning method for autonomous obstacle avoidance of live working manipulator based on motion primitive library
A technology for live work and path planning, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of huge amount of calculation, performance-dependent, and the amount of calculation is difficult to achieve engineering applications, etc., to improve the efficiency of inspiration, smooth motion, reduce Effects of computational effort and visual measurement difficulty
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0071] Step 1. Establish a complete kinematics model of the robotic arm, a simplified kinematics model of the robotic arm, and construct the working environment of the robotic arm. The specific steps are as follows:
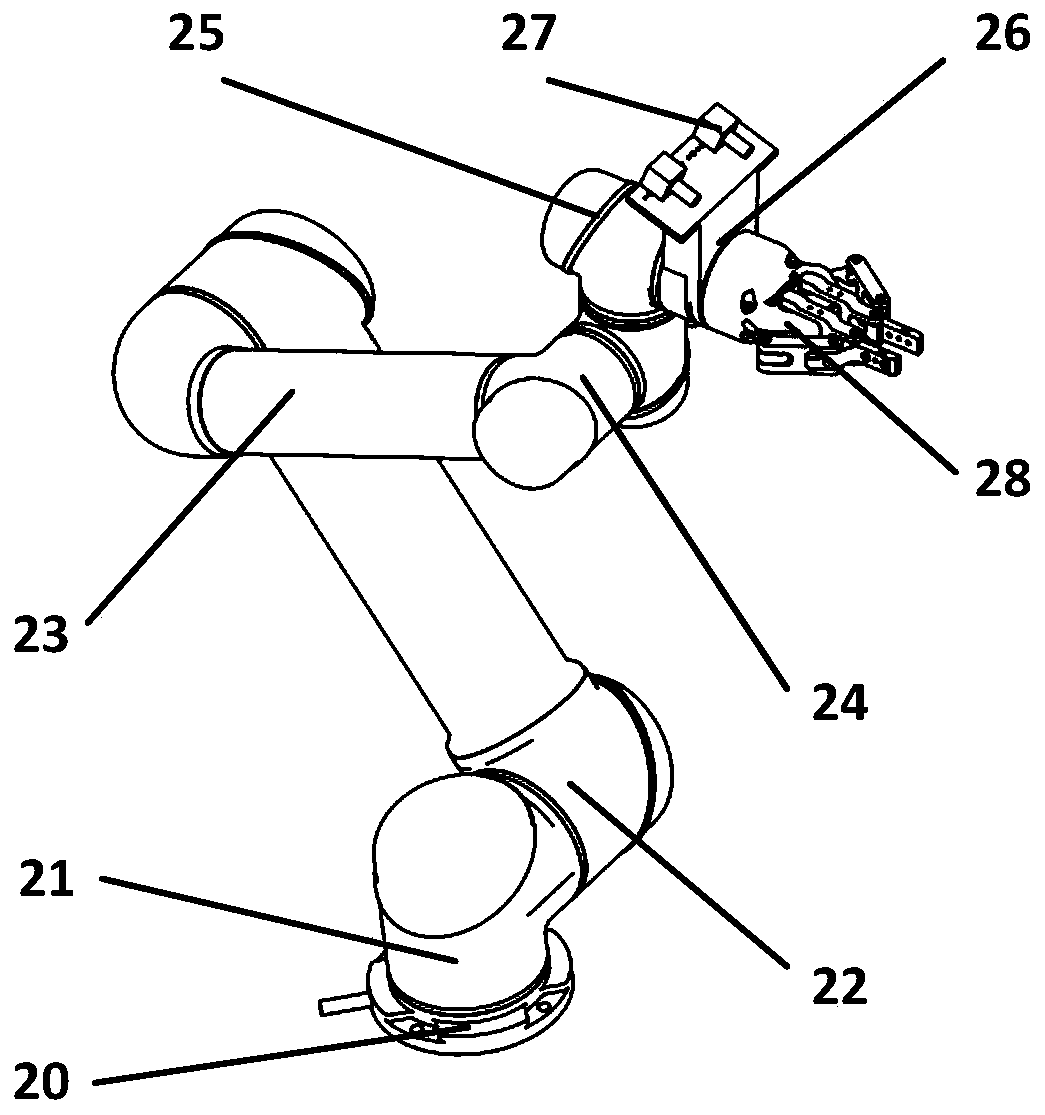
[0072] Step 1-1 According to the D-H parameters provided by the manufacturer, establish the robot joint coordinate transformation matrix T according to formula (1-2) 0 , Will T 0 As a complete kinematics model of the robotic arm, the specific implementation is as follows. Where T 0 The tool coordinate system is established with the center of the end of 28 as the origin, the base coordinate is established with the center of 20 as the origin, and the corresponding joint coordinate system w is established independently for the 6 joints. i , The geometric relationship of the mechanical arm joints of the established complete kinematics model of the mechanical arm is as attached Figure 7 Shown; in formula (1-2) Is the i-th joint coordinate system w i To the i-1th joint co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More