

Unmanned aerial vehicle interaction apparatus and method based on deep leaning and attitude estimation
A posture estimation and interaction device technology, applied in the field of UAV interaction, can solve the problems of inconvenience and complicated operation, and achieve the effect of convenient operation and accurate results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The accompanying drawings are only for illustrative purposes and should not be construed as limiting the patent; the technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and embodiments.
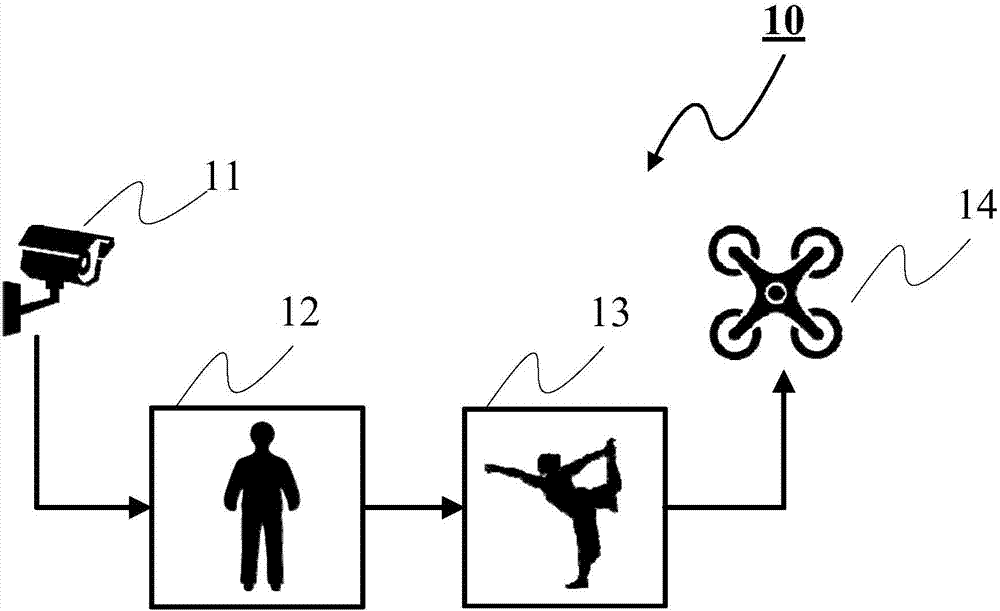
[0025] figure 1 It is a structural schematic diagram of the UAV interaction device according to the present invention.
[0026] Such as figure 1 As shown in , a UAV interaction device 10 based on deep learning pose estimation according to the present invention includes: a shooting unit 11, which is used to shoot an object video; a key frame extraction unit 12, which is used to extract information about The key frame image of the object; the pose estimation unit 13, for the image recognition algorithm based on the deep convolutional neural network, for the key frame image, recognize the object pose; and the UAV operation control unit 14, for identifying the The attitude of the object is converted into control instr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More