

Virtual endoscopy automatic and interactive path planning and navigation method suitable for complex cavity
A technology for virtual endoscope and path planning, which is applied in the directions of instruments, applications, and image data processing for radiological diagnosis. Simple, Lesion-Informative Results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
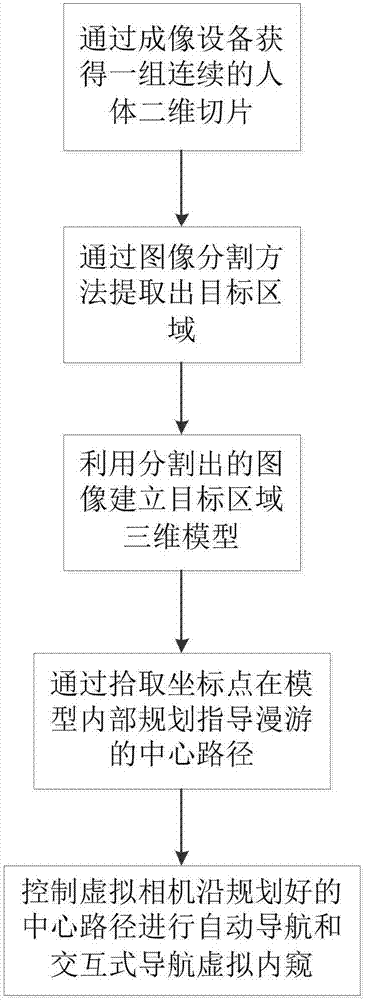
[0021] The process flow of the virtual endoscope automatic and interactive path planning and navigation method proposed by the present invention is as follows: figure 1 shown. The concrete steps of described method are as follows:
[0022] (1) Obtain a group of continuous two-dimensional slices of the human body through imaging equipment;
[0023] (2) Extract the target area by image segmentation method;
[0024] (3) Utilize the segmented image to establish a three-dimensional model of the target area;
[0025] (4) Plan and guide the center path of roaming within the model by picking up coordinate points;
[0026] (5) Control the virtual camera to perform automatic navigation and interactive navigation virtual endoscopy along the planned center path.
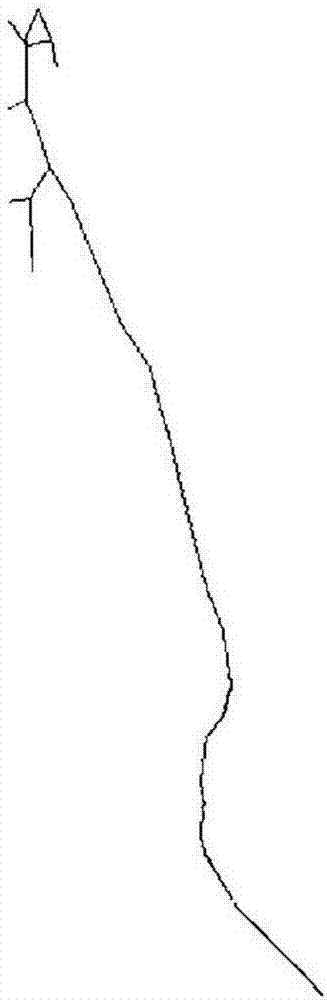
[0027] For example, the renal pelvis and calices of the kidney in the human urinary system are complex and have many branches. Using the method of the present invention, it is easy to plan the central path to guide the movem...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More