Medical logistics robot system based on visual positioning and control method thereof
A logistics robot and visual positioning technology, applied in the field of intelligent robots, can solve the problems of high distribution pressure of employees, increased labor costs, mismatches or delays, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
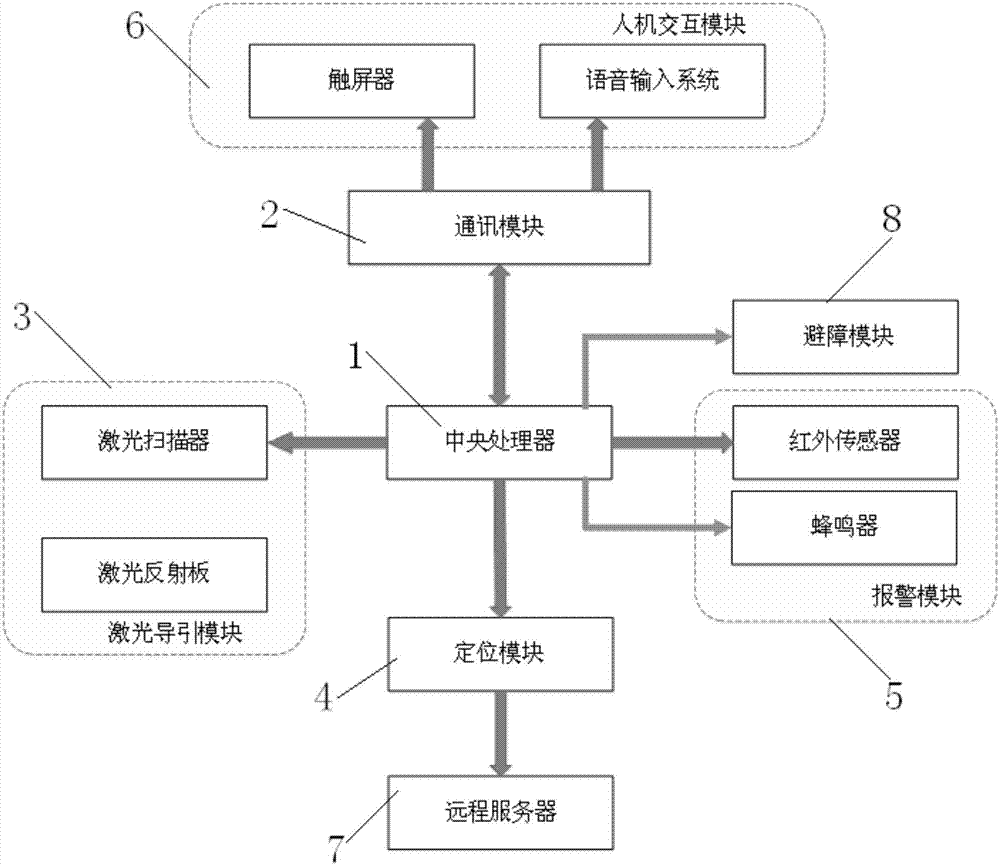
[0066] like figure 1 As shown, a medical logistics robot system based on visual positioning includes a central processing unit 1, a communication module 2, a laser guidance module 3, a positioning module 4, an alarm module 5, a human-computer interaction module 6, a remote server 7 and obstacle avoidance Module 8, the central processing unit 1 is electrically connected with the communication module 2, the laser guidance module 3, the positioning module 4, the alarm module 5, and the obstacle avoidance module 8, the communication module 2 is connected with the human-computer interaction module 6, the The positioning module 4 is connected with the remote server 7, wherein: the human-computer interaction module 6 includes a touch screen device, a voice input system, and provides a human-computer operation and display interface; the communication module 2 is used for receiving the human-computer interaction module 6 or remote control. The control signal of the terminal, and send t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More