

Robot teaching programming system and method
A programming system and robot technology, applied in the field of robot teaching programming system, can solve the problems of difficult use, inconvenient operation, and high professional knowledge requirements of operators, and achieve the effects of convenient programming, improved quality, and high programming efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
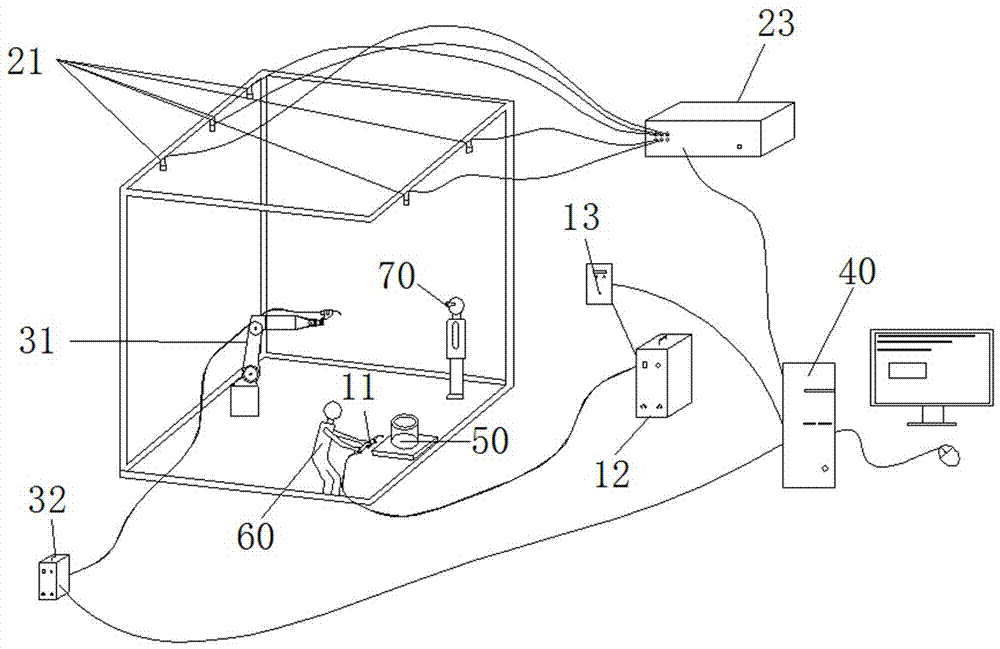
[0048] see figure 1 and figure 2 , a robot teaching programming system, including a teaching system, a posture tracking system, a physical robot system and a computer 40.
[0049] The teaching system includes a hand-held teaching tool 11, a teaching controller 12 and a teaching data collector 13, and the teaching data collector 13 is used to collect the hand-held teaching tool 11 operating on the operated part 50. The hand-held teaching tool 11 is connected to the teaching controller 12, and the teaching data collector 13 is connected to the teaching controller 12 and the computer 40 respectively. The number of the hand-held teaching tool 11 is at least one, such as a welding gun, a glue gun, a spray head, a grinding tool, an assembled part, etc., one or more are selected; , painted or glued parts; the teaching data collector 13 transmits the collected real-time process parameters and other working states to the computer 40, for example, when performing welding teaching pro...
Embodiment 2
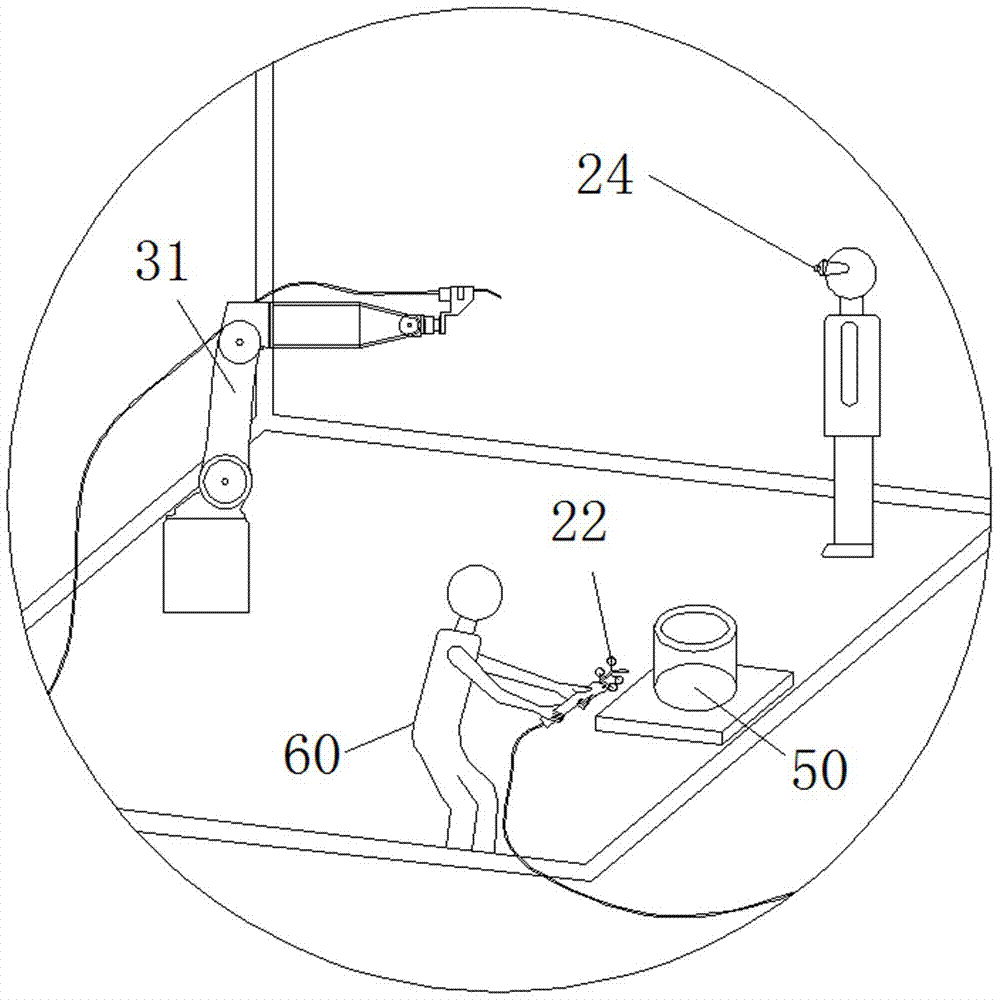
[0056] The difference between this embodiment and the first embodiment is that the robot teaching programming system also includes a head-mounted augmented reality display 70, and the pose tracking system also includes a registration marker 24, and the registration marker 24 is At least four registration mark points; the head-mounted augmented reality display 70 is connected to the computer 40 , and the registration mark 24 is fixed on the head-mounted augmented reality display 70 . The head-mounted augmented reality display 70 communicates with the computer 40 to receive and display the scene sent by the computer 40 . Generally, the head-mounted augmented reality display 70 may be an optically transparent augmented reality display.
[0057] The working principle of the second embodiment is: on the computer 40, a simulation model of the physical robot 31—virtual robot is established; The rotation angle of each joint of the virtual robot is then driven to move each joint of th...
Embodiment 3
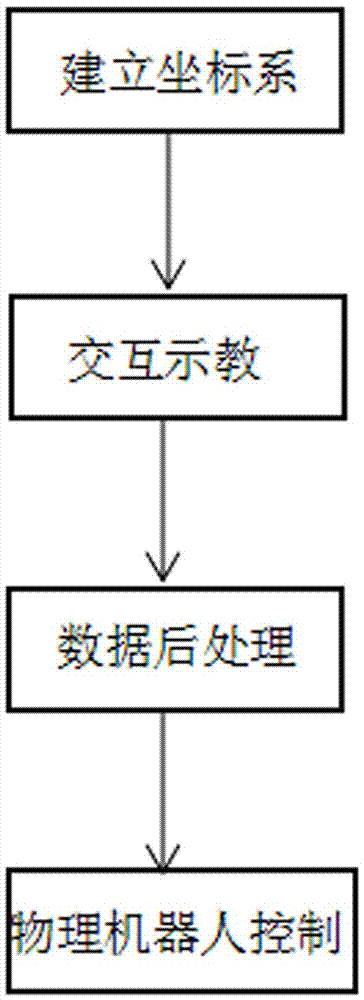
[0060] see Figure 1 to Figure 3 , a robot teaching programming method, the method is realized based on the robot teaching programming system, the specific steps are as follows:
[0061] Step 10, establish a coordinate system: include
[0062] Set up the pose tracking system coordinate system: set up the pose tracking system coordinate system on the pose calculation unit 23, and make it coincide with the physical robot coordinate system, so as to ensure that the pose tracked by the pose tracking system is all in Sitting posture under the physical robot coordinate system; The physical robot coordinate system is inherent in the physical robot 31; Existing posture tracking system, such as Optitrack position tracking system, this system includes camera and position tracking software, etc., position The tracking accuracy can reach 0.1mm, and the direction tracking accuracy is 0.1 degree.
[0063] Establish the coordinate system of the hand-held teaching tool: install the hand-hel...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More