

A Robot Automatic Troubleshooting Method
A robot and automatic rowing technology, applied in the field of robots, can solve the problems of small troubleshooting area, single troubleshooting function, and low flexibility, and achieve the effects of improving anti-noise ability, improving recognition accuracy, and improving work efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0061] The present invention will be described in further detail below in conjunction with the accompanying drawings.
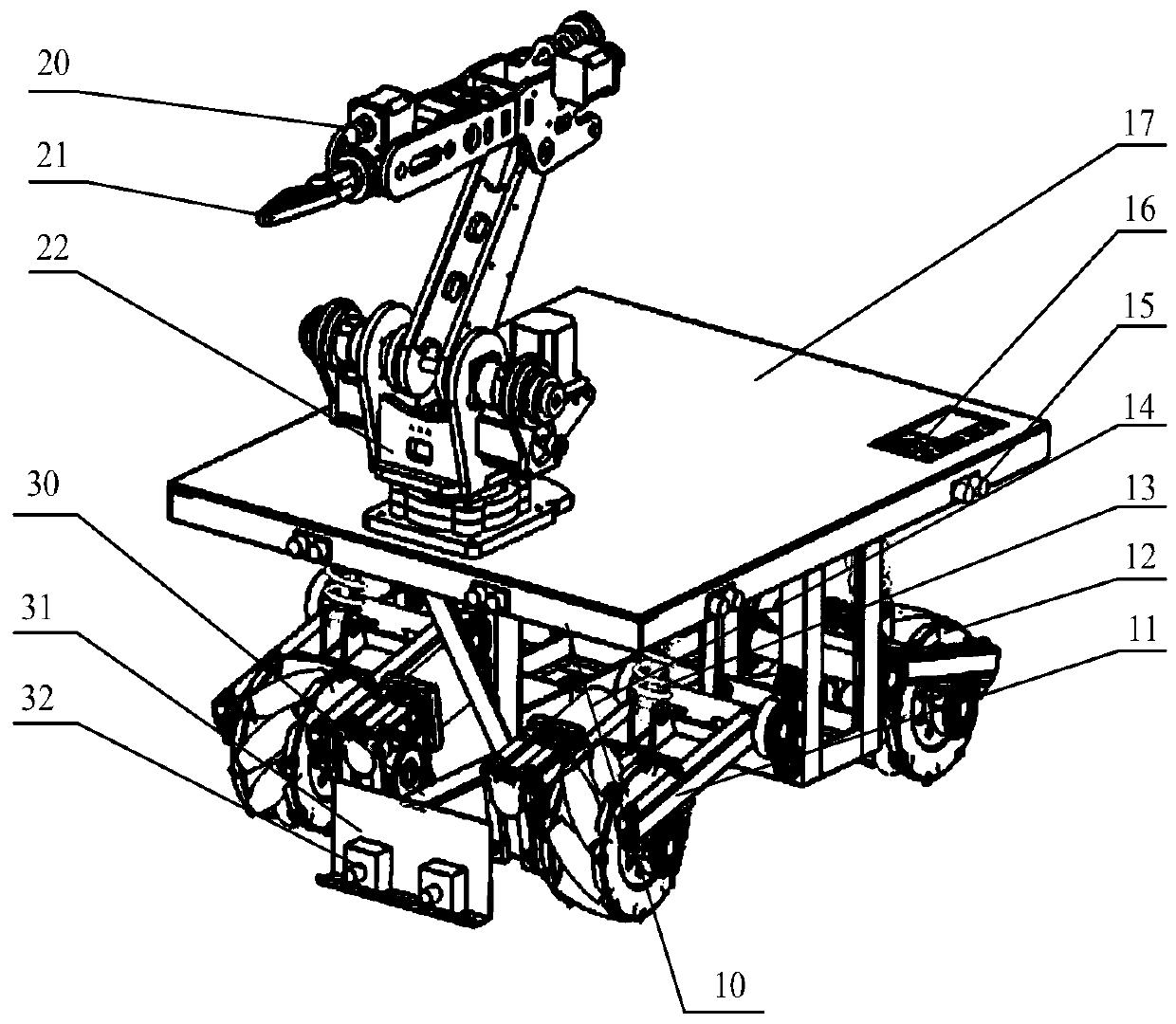
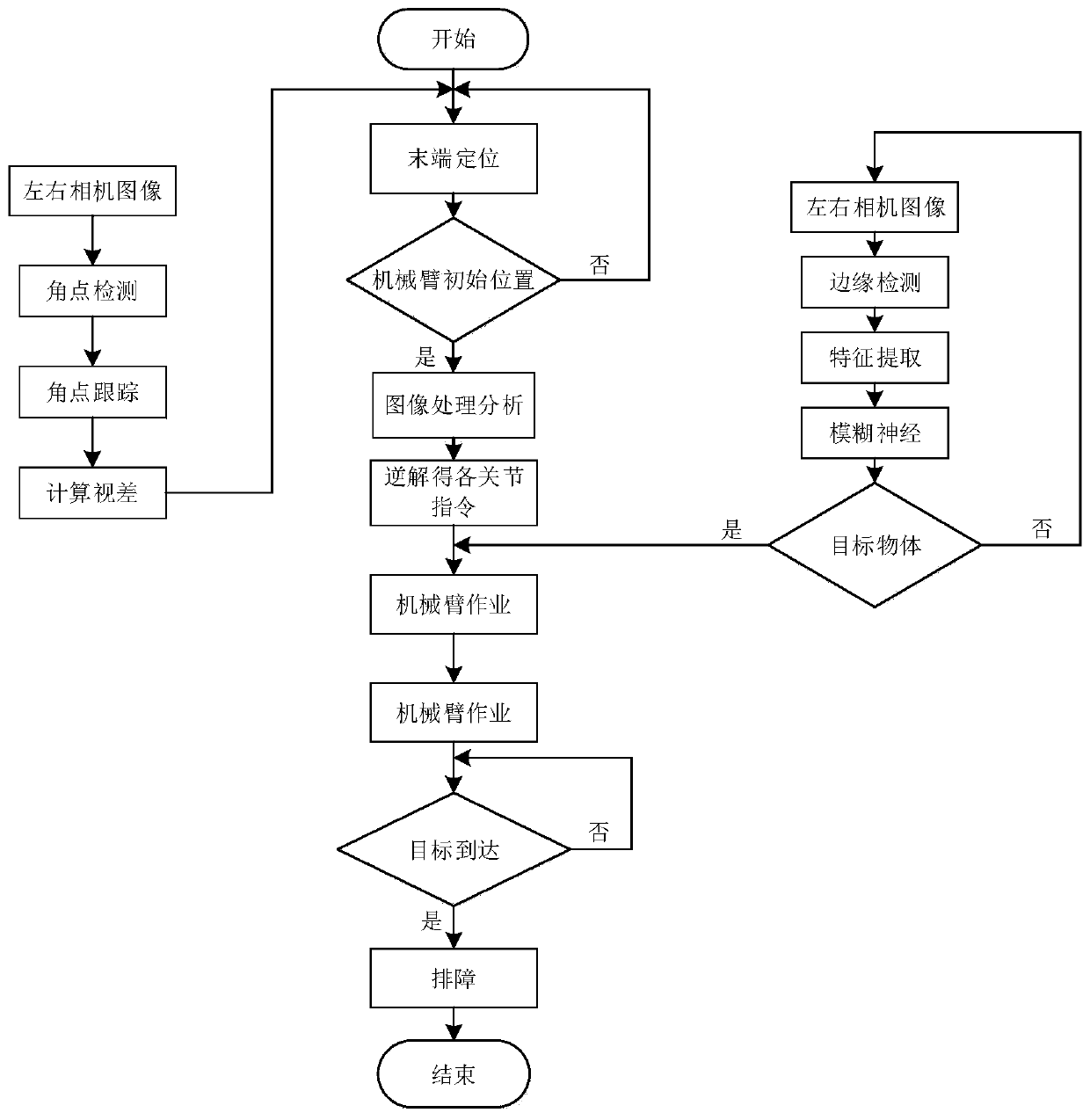
[0062] Such as figure 1 As shown, it is a flow chart of the automatic troubleshooting method for a robot according to an embodiment of the present invention. The method of this embodiment is used to detect and eliminate obstacles, and its robot includes an omnidirectional mobile chassis 10, a manipulator obstacle removal device 20, an image acquisition device 30, and a robot control system;
[0063] Described omnidirectional mobile chassis 10 comprises Mecanum wheel 12, reduction motor 14, H-type suspension 11, vehicle body 17 etc.; Omnidirectional mobile chassis 10 is equipped with shock absorber 13, guarantees the steady progress of robot on unbalanced ground;
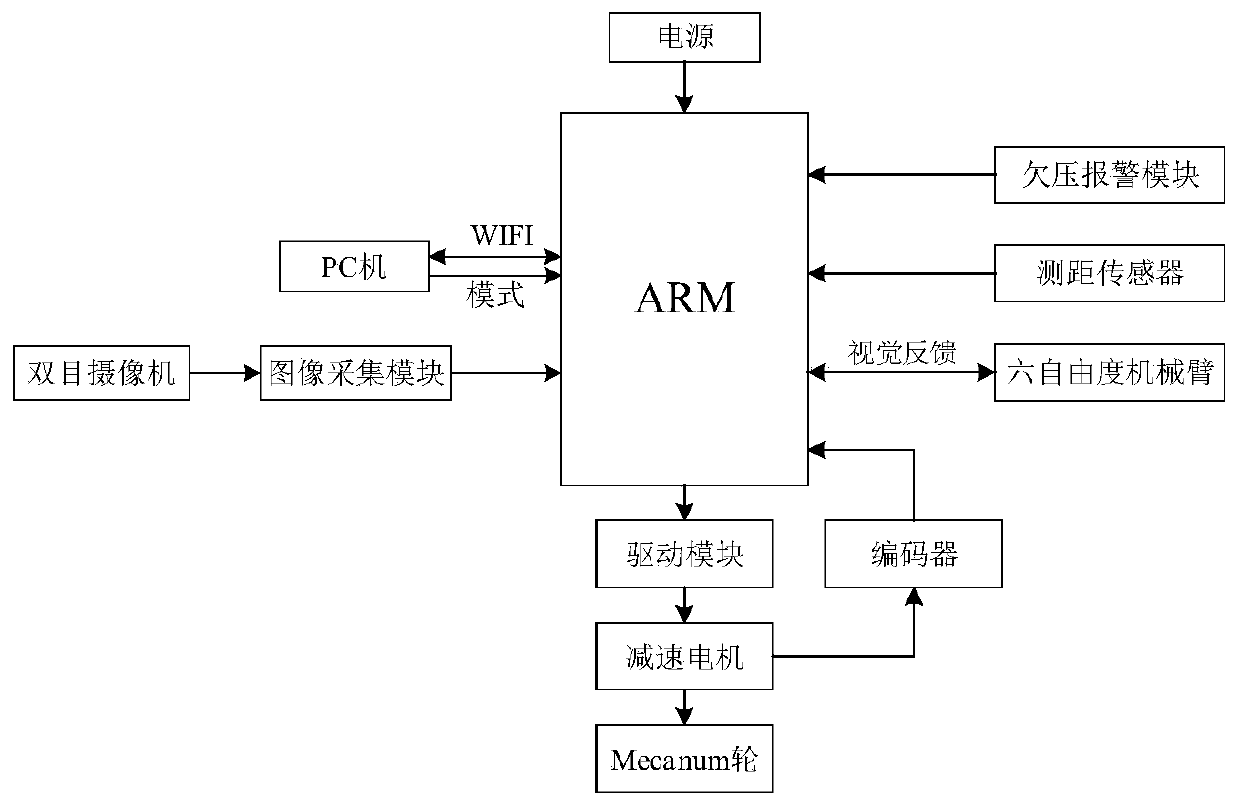
[0064] Described vehicle body 17 is provided with the robot control system that adopts ARM processor, and the built-in display screen 16 is used for displaying the motion state of robot on the vehi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More