

Flexible hinge based piezoelectric driving three-jaw bionic microsized clamping mechanism
A technology of flexible hinges and clamping mechanisms, applied in non-electrical variable control, using stable tension/pressure to test material strength, strength characteristics, etc., can solve difficult mechanical properties, micro-sized specimens are not easy to clamp, research, etc. problems, to avoid damage or falling off, improve service reliability, and have the effect of exquisite structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The detailed content of the present invention and its specific implementation will be further described below in conjunction with the accompanying drawings.
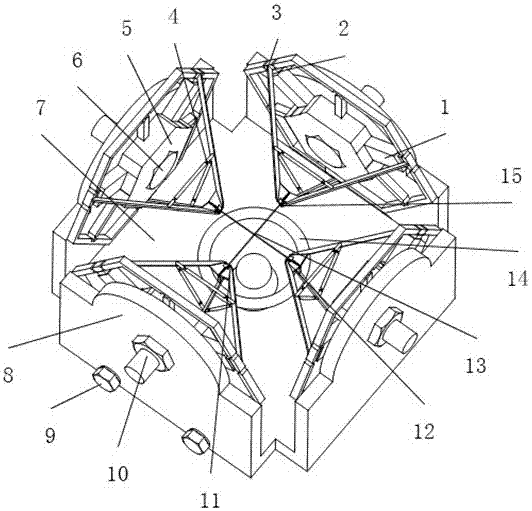
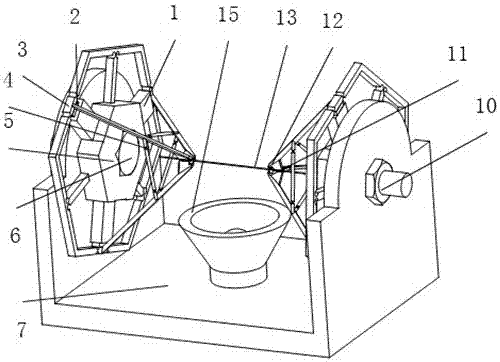
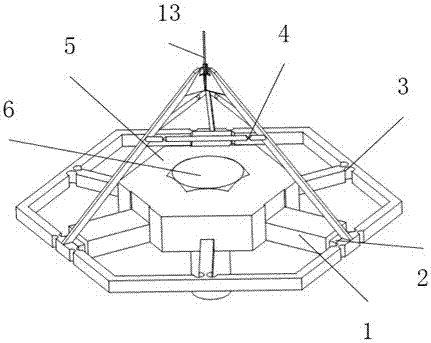
[0030] see Figure 1 to Figure 7 As shown, the flexible hinge-based piezoelectric-driven three-jaw bionic micro-sized clamping mechanism of the present invention includes a piezoelectric loading unit, a flexible hinge transmission unit, a bionic clamping unit, a clamping force detection unit, a high-temperature loading unit, and a Disassemble the support unit, the flexible hinge base 5 is processed with regular grooves, which match the size of the multi-load packaged piezoelectric stack 1, and the multi-load packaged piezoelectric stack 1 is embedded in the groove of the flexible hinge base 5 , and is preloaded through a preload block 2 with adjustable thickness, so as to ensure that the multi-load encapsulated piezoelectric stack 1 bears the compressive load. The piezoelectric stack driver outputs voltage to the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More