

A parameter integration design method for a five-degree-of-freedom hybrid robot
An integrated design and degree of freedom technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems that cannot be realized, design problems are complicated, and robot dynamic performance cannot be guaranteed, so as to avoid mutual coupling, integrate and optimize design, The effect of saving design effort
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] The following describes in detail the parameter integration design method of a five-degree-of-freedom hybrid robot of the present invention with reference to the embodiments and drawings.
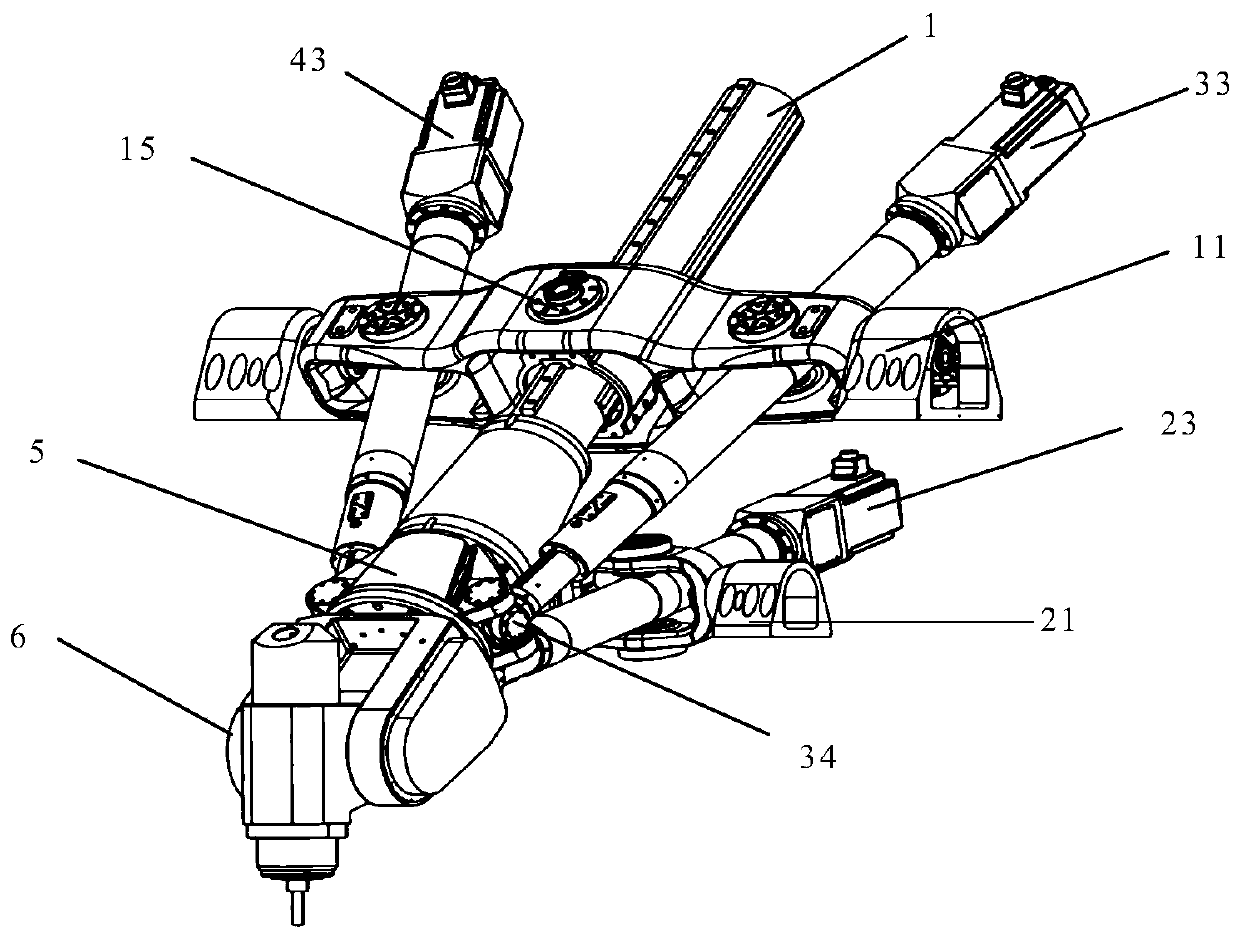
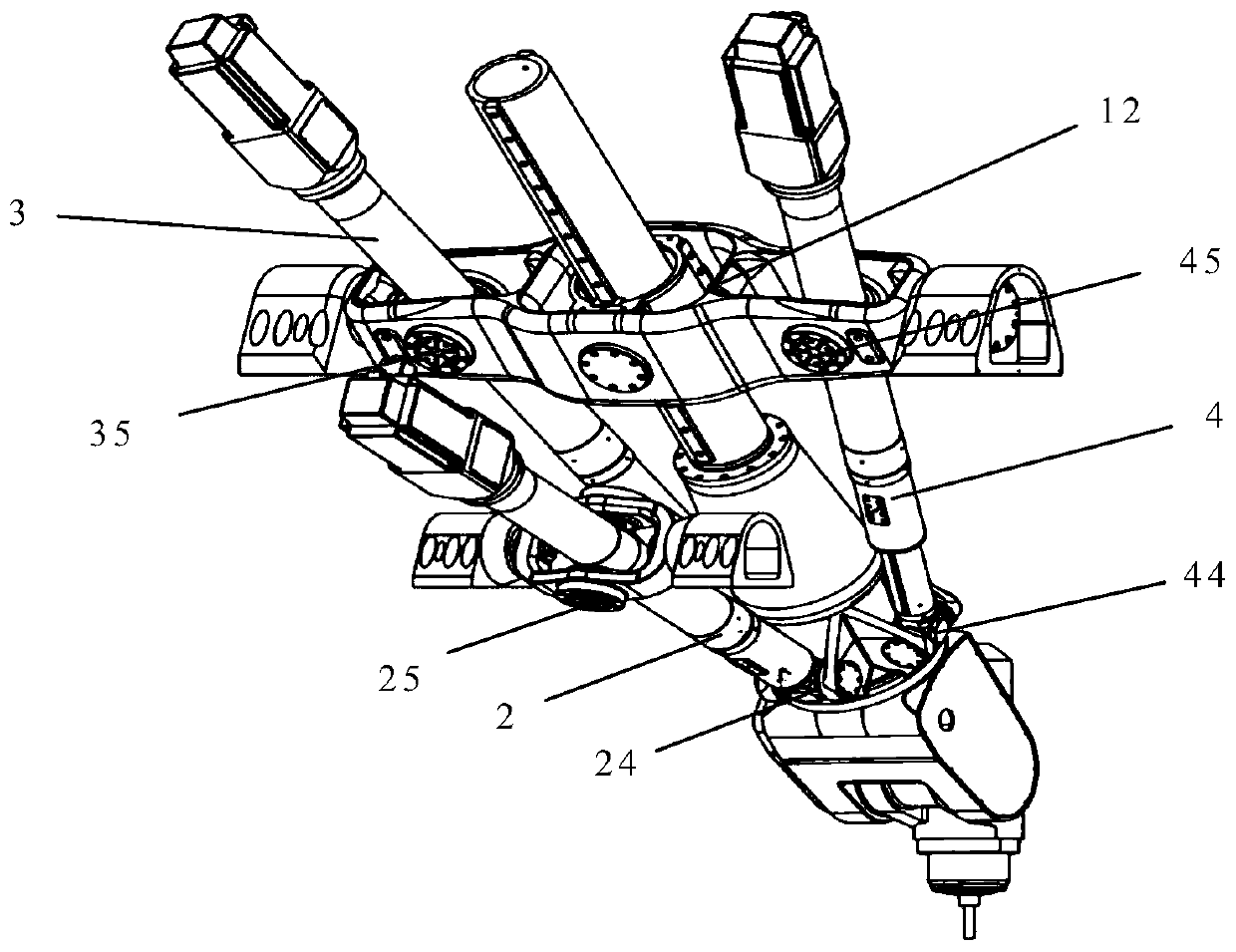
[0048] In the parameter integration design method of a five-degree-of-freedom hybrid robot of the present invention, the five-degree-of-freedom hybrid robot adopts a five-degree-of-freedom containing multi-axis rotating bracket disclosed in the patent number ZL201510401279.9 Hybrid robot. Such as figure 1 , figure 2 As shown, it consists of a parallel mechanism with two translational three degrees of freedom and a two-degree-of-freedom rotor 6 connected in series with two rotational degrees of freedom. The parallel mechanism includes three parallel mechanisms that can be elongated in the axial direction. Or shortened active adjustment device 2 / 3 / 4, a driven adjustment device 1, a rotating bracket 12 and a frame.
[0049] One end of the first active length adjusting device 2 is connecte...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More