

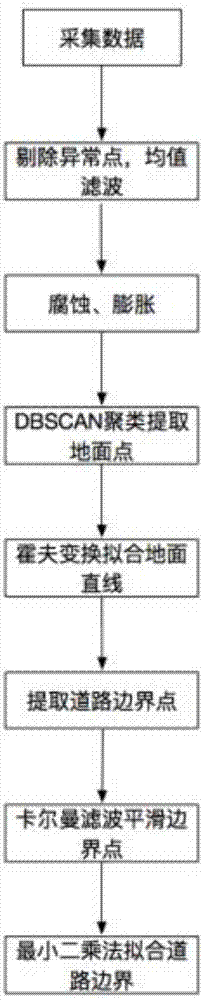
Unstructured road detection method based on four-line laser radar
An unstructured and road detection technology, which is applied in the direction of radio wave measurement system, measurement device, electromagnetic wave re-radiation, etc., can solve the problem of not being able to accurately obtain the range of passable road areas, and achieve good real-time performance, good reliability, The effect of high accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
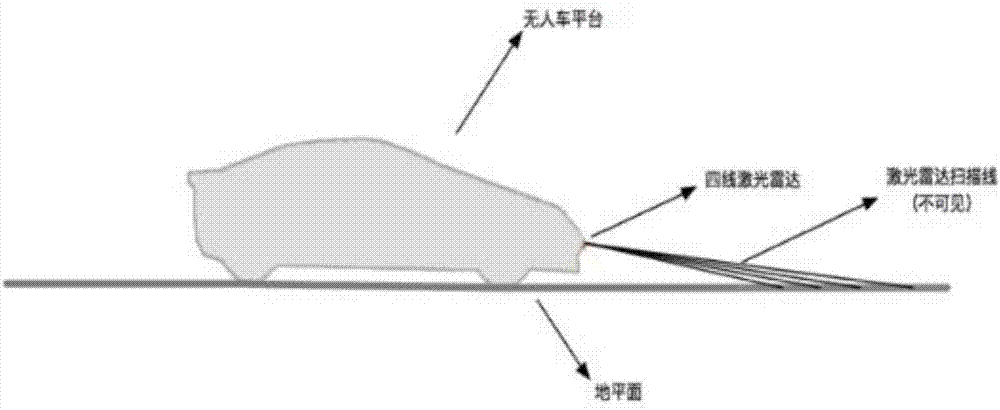
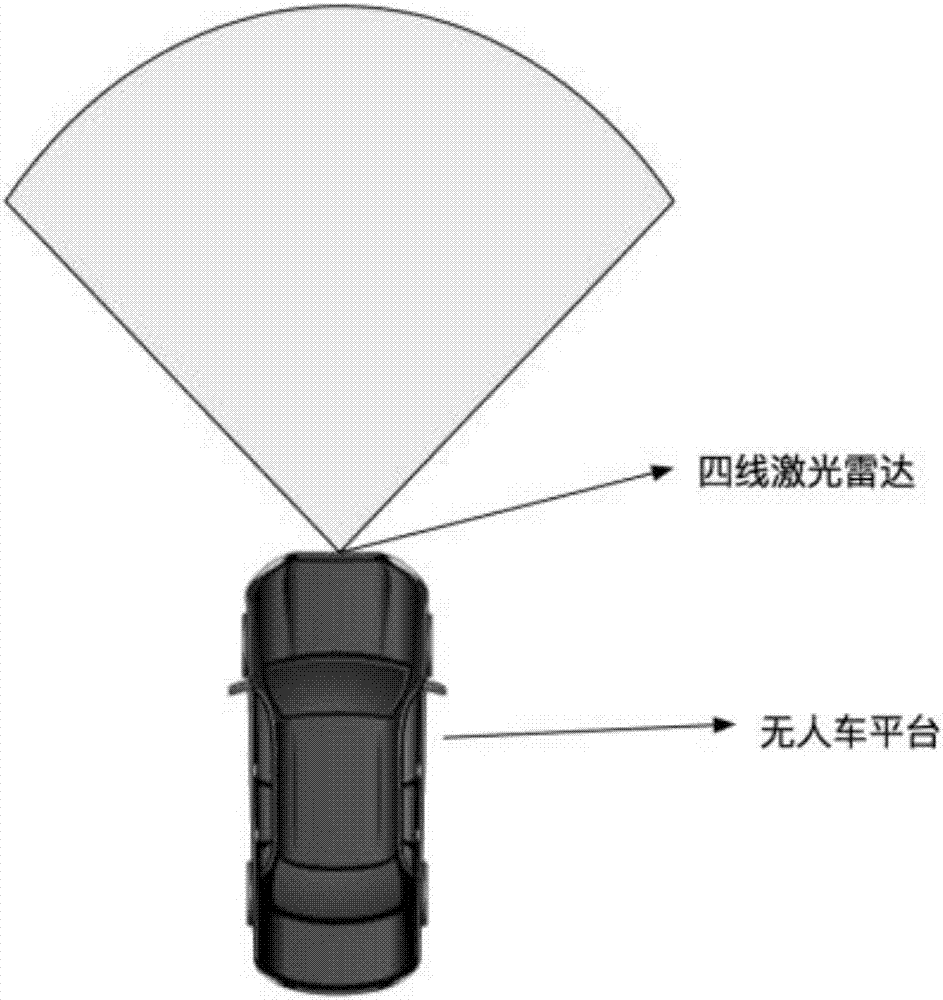
[0050] As shown in Figure 2, assume that the positive direction of the Z-axis of the vehicle body coordinates is vertical and horizontal, and satisfies the right-handed coordinate system, and the origin of the vehicle body coordinates is located at the center of its rear axis. The installation of the four-line laser radar should satisfy that its X-axis direction is the same as that of the car body coordinate X-axis, and ensure that its installation position is located in the car body coordinate X=0 plane. In the actual installation process, it is installed in the center of the front of the vehicle. Considering the complexity of the unstructured environment, the height of the lidar should be at least higher than 60cm under the premise of ensuring the passability of the vehicle. The four-line laser radar can detect depth data within 110° in the horizontal direction and 3.2° in the vertical direction. During the installation process, the pitch angle of the laser radar should be ad...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More