

Visual programming method and operation system of truss mechanical arm
A programming method and operating system technology, applied in the field of automation equipment, can solve problems such as increasing user capital costs, delaying debugging progress, etc., to achieve the effect of speeding up debugging progress and saving debugging costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
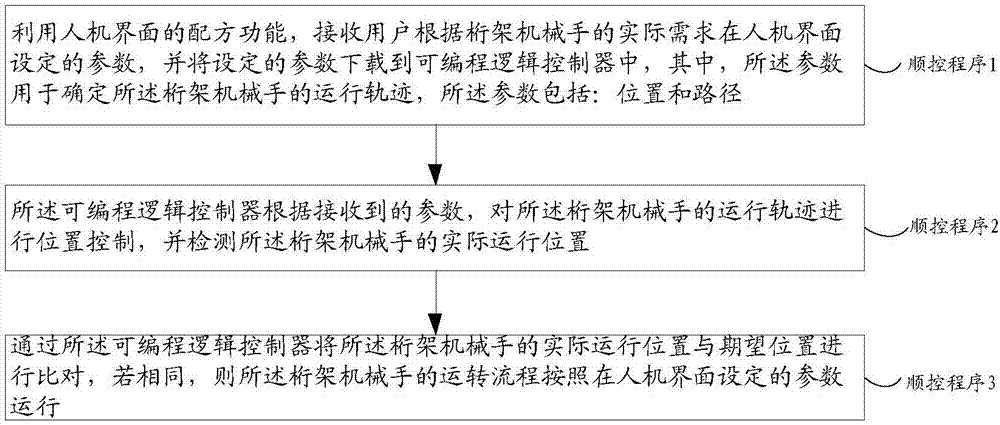
[0041] Such as figure 1 As shown, the visual programming method of the truss manipulator provided by the embodiment of the present invention includes:
[0042] The sequence control program 1 uses the formula function of the man-machine interface to receive the parameters set by the user on the man-machine interface according to the actual needs of the truss manipulator, and download the set parameters to the programmable logic controller, wherein the parameters For determining the running trajectory of the truss manipulator, the parameters include: position and path;
[0043] Sequential control program 2, the programmable logic controller performs position control on the running trajectory of the truss manipulator according to the received parameters, and detects the actual running position of the truss manipulator;
[0044] Sequential control program 3, compare the actual running position of the truss manipulator with the expected position through the programmable logic cont...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More