Mechanical hand having space full-covering working capability
A technology with operating ability and full coverage, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of inability to expand and contract freely, small range of motion, poor adaptability to narrow spaces, etc. regulatory effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
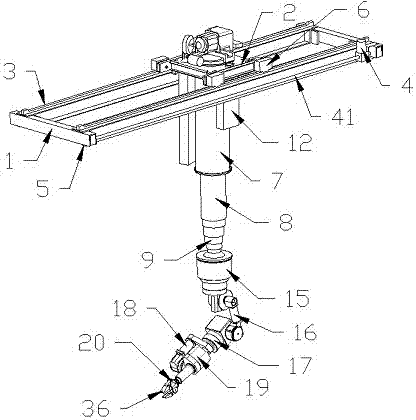
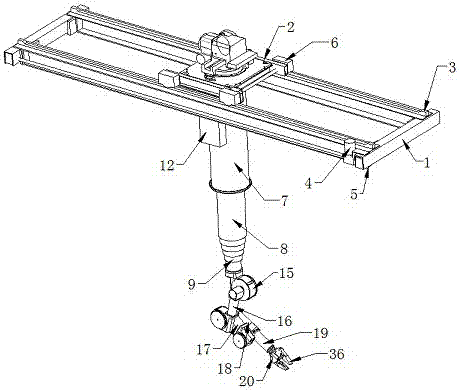
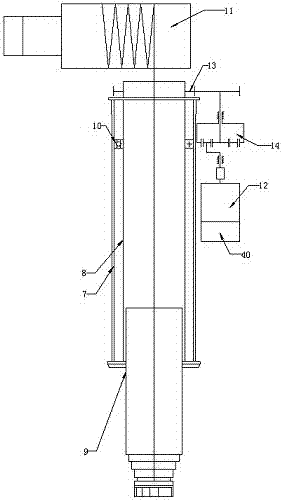
[0035] This embodiment, as the best embodiment of the present invention, discloses a manipulator with full space coverage operation capability, and its specific structure diagrams are shown in 1 and figure 2As shown, it includes a crane, a rotary telescopic cylinder and a mechanical arm. The crane includes a cart 1 and a trolley 2. The bottom of the cart 1 is provided with a cart traveling wheel 5, and the top of the cart 1 is provided with a track 3 and a motion motor 4. , the moving motor 4 is connected with the cart running wheel 5 through the transmission shaft 41, the track 3 is connected with the trolley 2 through the trolley traveling wheel 6, the trolley 2 is also provided with a movement motor 4, and the bottom of the trolley 2 is connected to the trolley. The rotary telescopic cylinder is connected, and the rotary telescopic cylinder includes a fixed cylinder 7, a rotary cylinder 8 and a telescopic cylinder 9. The fixed cylinder 8 is fixedly installed on the bottom o...
Embodiment 2
[0042] This embodiment is another preferred embodiment of the present invention, and its disclosed mechanical arm comprises shoulder joint 15, big arm 16, forearm 17 and wrist joint 18 connected in sequence, and its shoulder joint 15 is fixed with the end of telescopic tube 9 Connection, the end of the wrist joint 18 is connected with the end tool 20 through the connection head 35 .
[0043] The invention can accurately adjust the specific working position of the mechanical arm in the space through the coordinated movement of the cart and the trolley, and at the same time realizes the up and down movement of the mechanical arm in the space through the adjustment of the electric hoist and the gravity of the mechanical arm itself, thereby realizing The adjustment of the working position of the manipulator in the working space, while the manipulator has multiple degrees of freedom such as arm rotation, forearm rotation, forearm rotation, wrist rotation, wrist rotation, wrist exten...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com