

Mobile manipulator grasping control system and method based on machine vision
A mobile manipulator, machine vision technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of inaccurate target positioning and low degree of intelligent control, achieve long service life, improve production efficiency and accuracy high effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
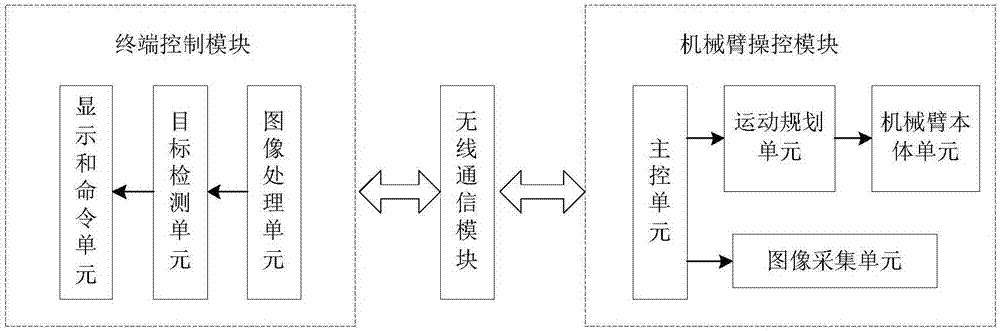
[0038] Such as figure 1 As shown, a mobile robotic arm grasping control system based on machine vision, the mobile robotic arm grasping control system is a cross-border integration of a series of information technologies such as machine vision, image processing technology, robot kinematics, including: terminal control module, a wireless communication module, and a manipulator control module, the terminal control module includes an image processing unit, a target detection unit, a display and command unit, and the manipulator control module includes a main control unit, an image acquisition unit, a motion planning unit, and a manipulator body unit.
[0039] The terminal control module is connected with the wireless communication module, receives a large amount of data including machine vision information acquired through the image acquisition unit, and uses the image processing unit to process and analyze the image information accordingly, or through the display and command uni...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More