

Spherical hexapod robot capable of rolling and walking
A hexapod robot and robot technology, applied in the direction of instruments, motor vehicles, non-electric variable control, etc., can solve the problems of difficult to find reference objects, low work efficiency, high walking efficiency, etc., and achieve simple structure and high work efficiency , good maneuverability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] In order to make the object, technical solution and advantages of the present invention more clear, the present invention will be further described in detail below in conjunction with the examples. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
[0043] The application principle of the present invention will be described in detail below in conjunction with the accompanying drawings.
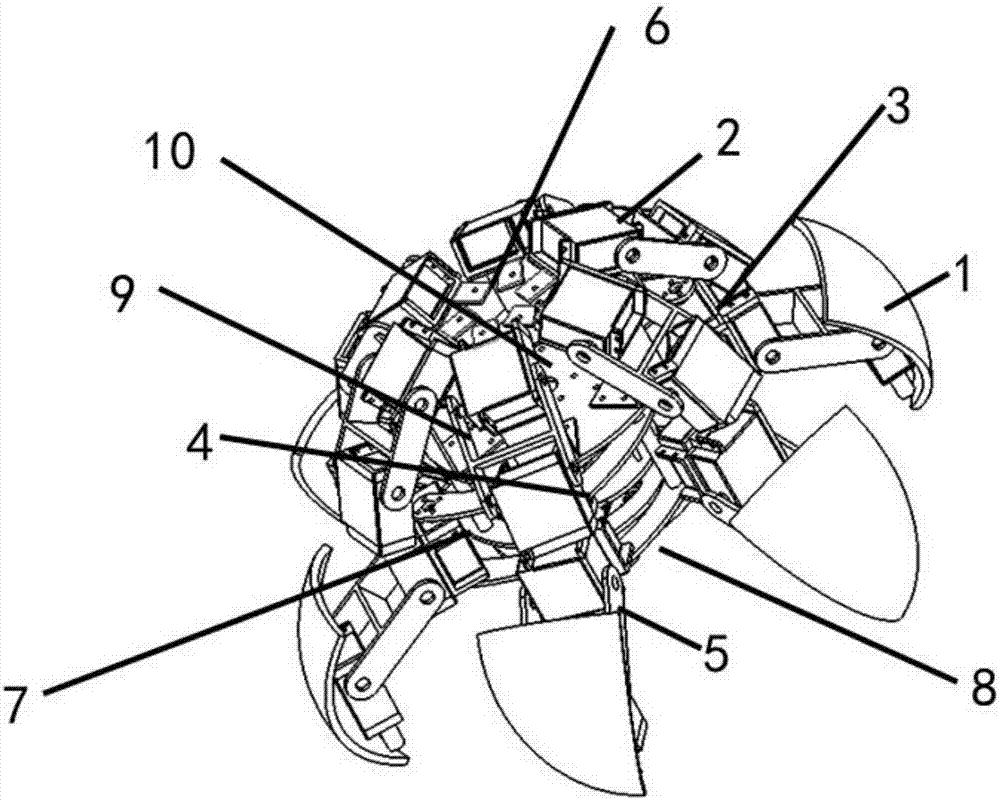
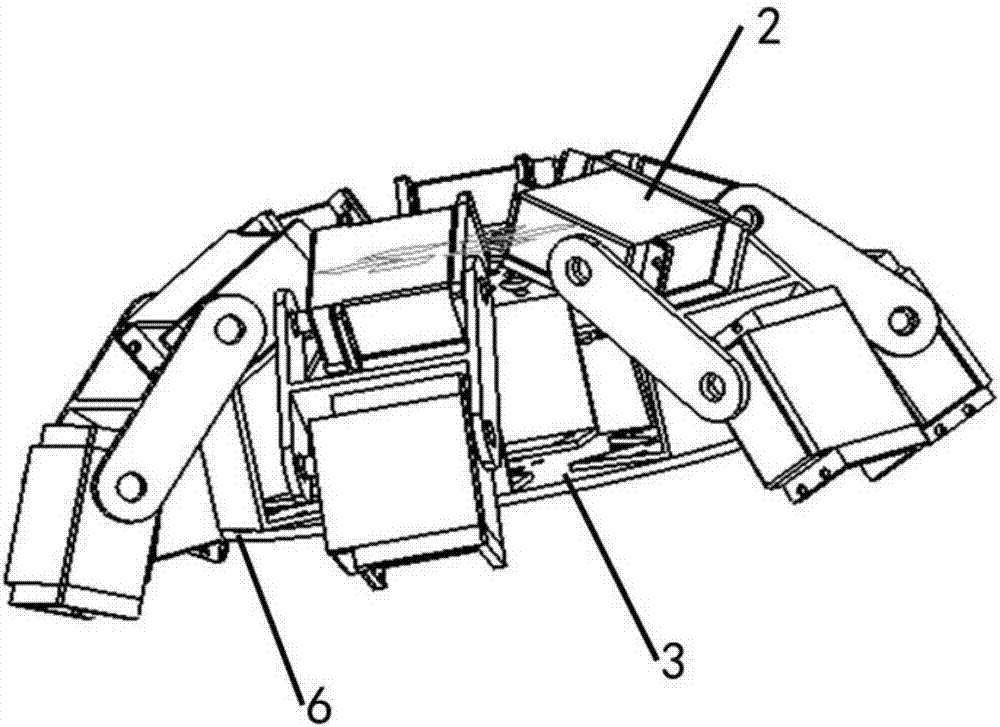
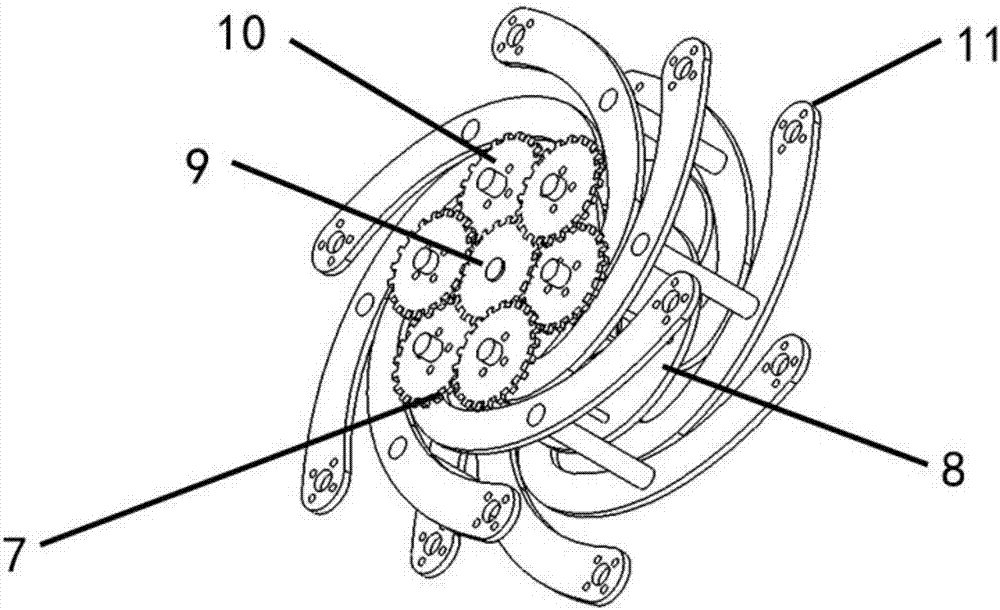
[0044] Such as Figure 1-Figure 8As shown, the spherical hexapod robot capable of rolling and walking provided by the embodiment of the present invention includes: a shell 1, an upper limb 2, a disk 3, a curved rod 4, a lower limb 5, a bracket 6, an upper disk 7, and a lower disk 8 , driving wheel 9, driven wheel 10, curved bar 11.
[0045] The spherical hexapod robot that can realize rolling and walking provided by the embodiment of the present invention includes upper, middle and l...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More