

Hexapod-robot real-time gait planning method based on deep reinforcement learning
A hexapod robot and reinforcement learning technology, which is applied in the field of real-time gait planning of hexapod robots based on deep reinforcement learning, can solve the problem of long-distance autonomous walking and unstable end position, and the hexapod robot gait planning technology cannot adapt to complex terrain environment and other issues, to achieve real-time gait planning, solve the dimensional disaster, and promote convergence.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
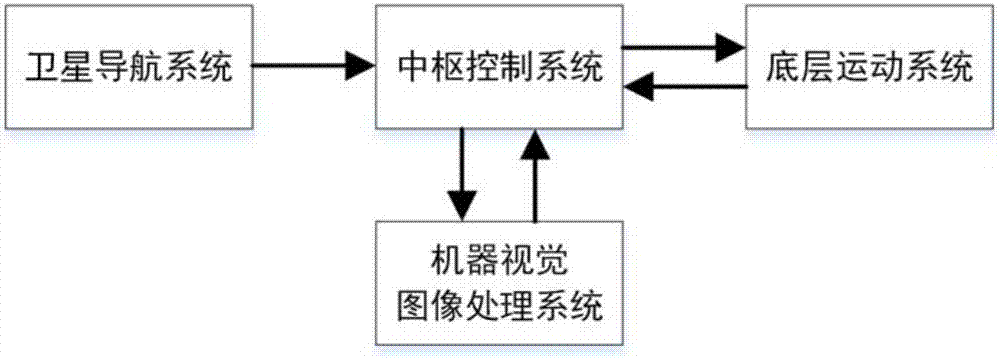
[0044] Such as figure 1 As shown, a real-time gait planning method for a hexapod robot based on deep reinforcement learning of the present invention operates on a system including: a satellite navigation system, a machine vision and image processing system, a central control system, and an underlying motion system.
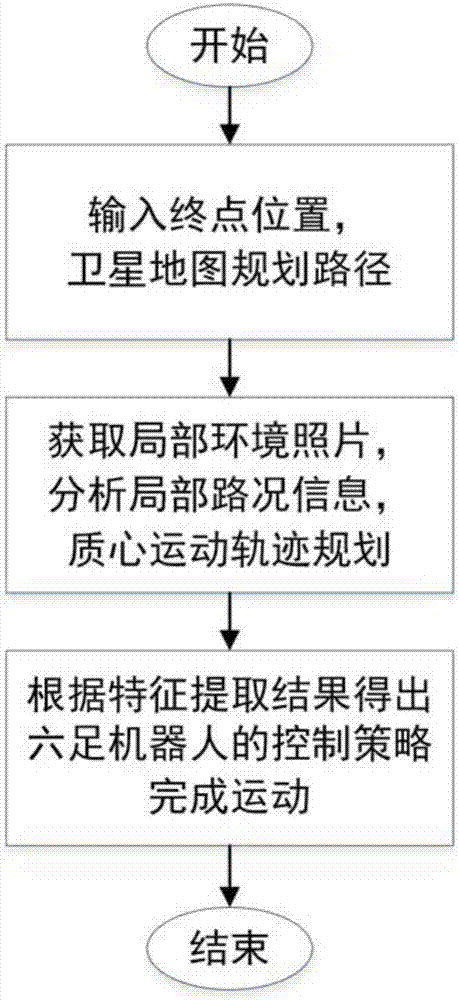
[0045] Among them, the satellite navigation system is mainly composed of satellite map software installed on the hexapod robot. After inputting the destination, it can quickly complete the path planning and transmit the path planning information to the central control system; the image processing system is mainly installed on the The camera at the front of the hexapod robot and the matlab software installed on the industrial computer; the central control system is mainly composed of a dynamics simulation platform installed on the industrial computer to pre-train the deep reinforcement learning network and communication module based on deep deterministic policy grad...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More