

A Structural Redundancy Parallel Robot Mechanism with Three Relative Degrees of Freedom
A degree of freedom, robot technology, applied in the field of robots, can solve the problems of small working space, difficult to avoid singular configuration, limited mechanism application, etc., to achieve the effect of easy production and processing, and simple mechanism structure.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention will be further described in conjunction with the accompanying drawings.
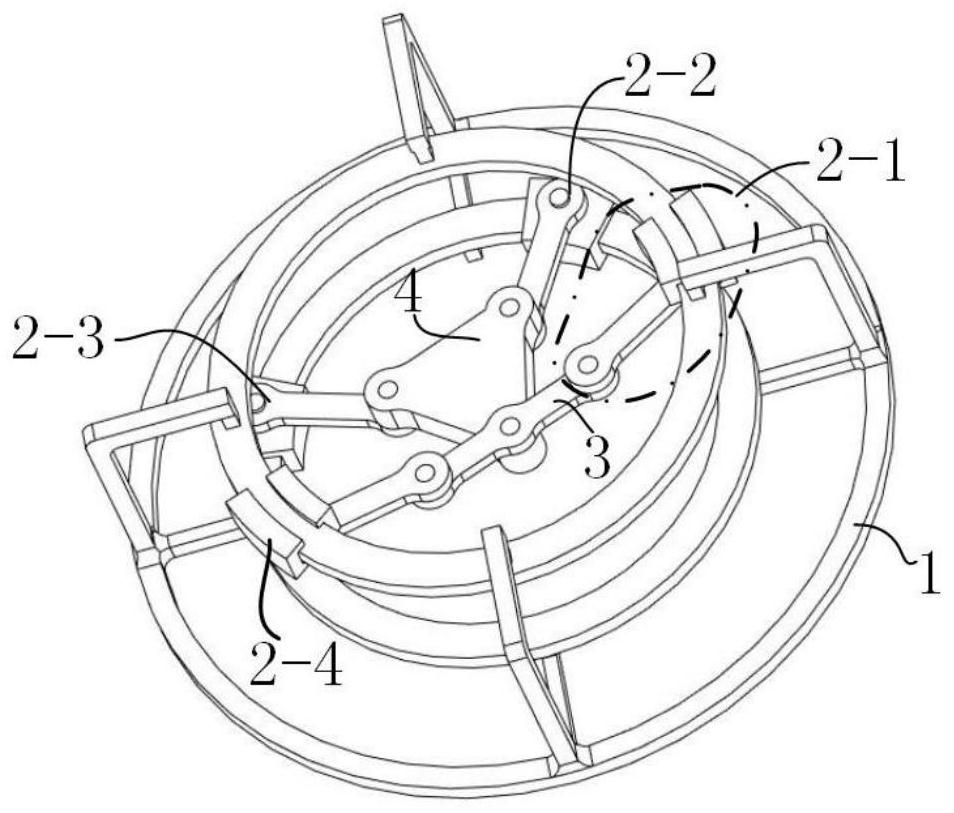
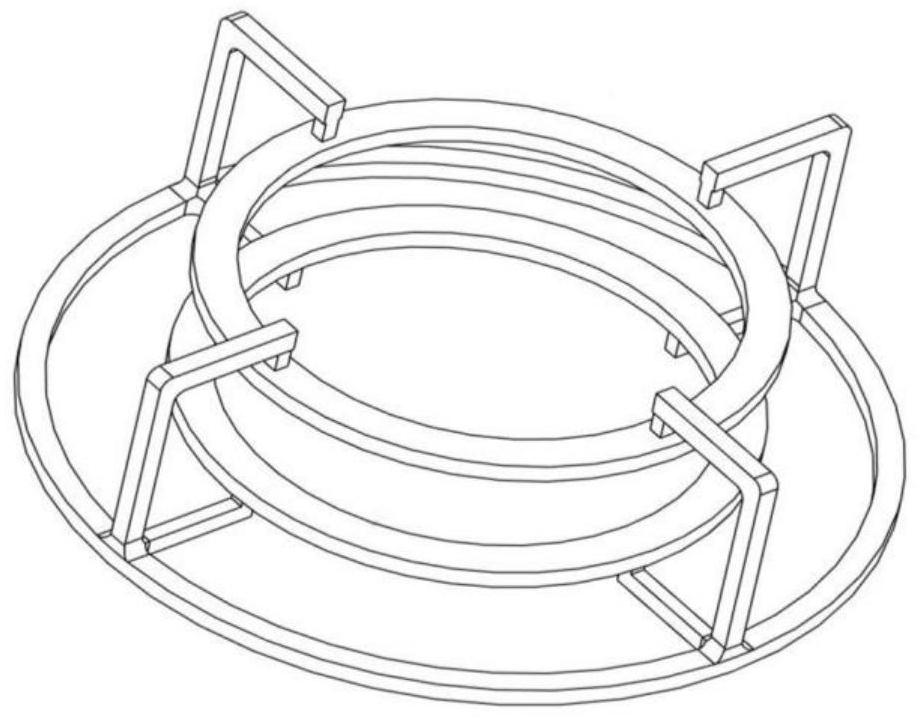
[0025] A structurally redundant parallel robot mechanism with three relative degrees of freedom, the parallel robot mechanism includes: a base 1, a first branch chain assembly 2-1, a second branch chain assembly 2-2, and a third branch chain assembly 2- 3. The fourth branch chain assembly 2-4, the long connecting rod 3, and the moving platform 4.
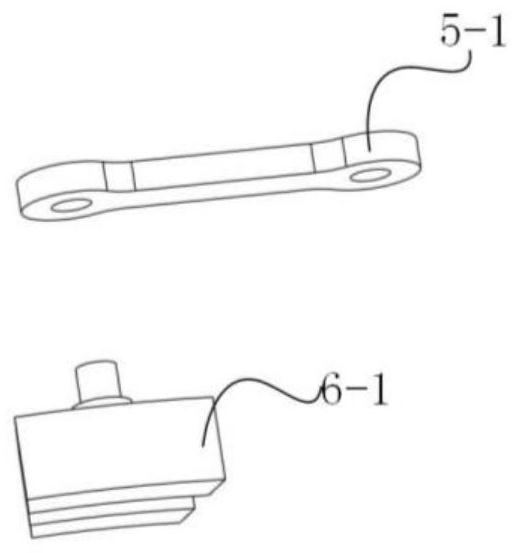
[0026] The first branch chain assembly includes: a first connecting rod 5-1, and a first slider 6-1.
[0027] The connection between the parts constituting the first branch chain assembly 2-1: the first connecting rod 5-1 is connected with the protruding end of the first sliding block 6-1 to form a rotary pair.
[0028] The second branch chain assembly 2-2 includes: a second connecting rod 5-2, and a second sliding block 6-2.
[0029] The connection between the parts constituting the second branch chain assembly 2-2: the second ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More