

Multi-sensory human-simulated five-finger dexterous hand
A dexterous hand and five-fingered technology, applied in the field of multi-sensing human-like five-fingered dexterous hands, can solve problems such as poor perception ability and insufficient freedom of dexterous hands, and achieve the effects of low cost, simple structure and high degree of anthropomorphism
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] A kind of multi-sensory humanoid five-fingered dexterous hand proposed by the present invention is described in detail as follows in conjunction with the accompanying drawings and embodiments:
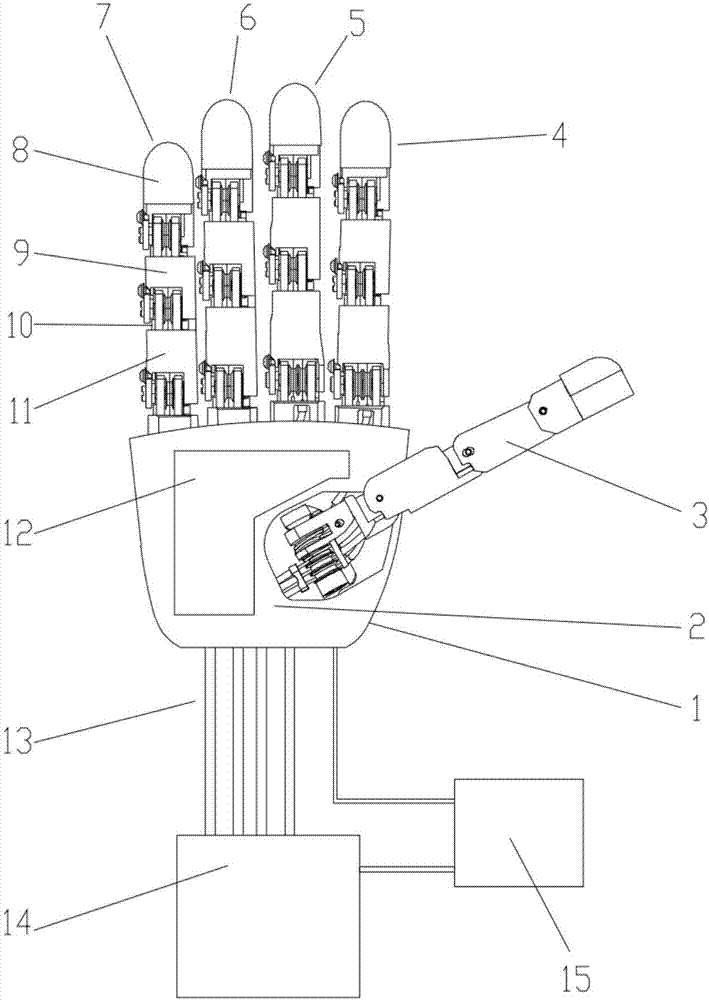
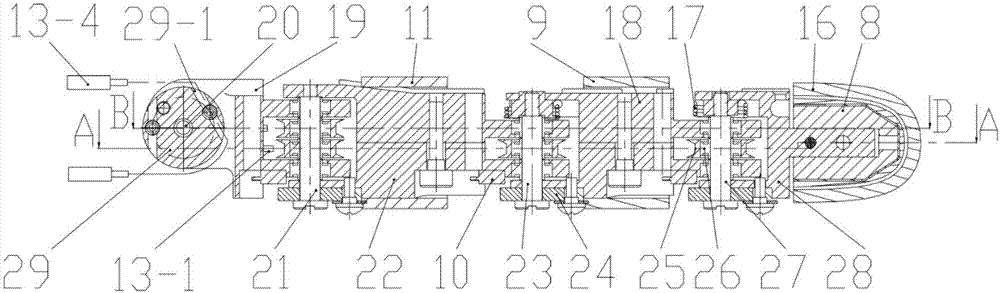
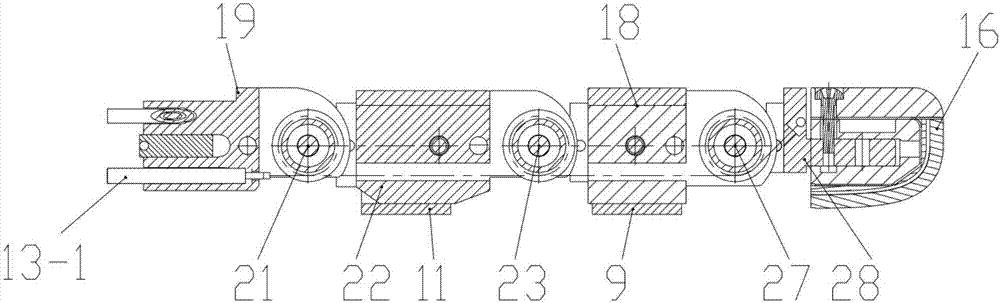
[0020] The overall structure of a multi-sensory humanoid five-finger dexterous hand proposed by the present invention is as follows: figure 1 As shown, including palm 2, thumb 3, index finger 4 and middle finger 5 with the same structure, ring finger 6 and little finger 7 with the same structure, and multiple sets of sensor units, a total of 20 degrees of freedom, including 13 active degrees of freedom, 7 3 passive degrees of freedom, each finger has 4 degrees of freedom, thumb 3, index finger 4 and middle finger 5 all have 3 active degrees of freedom and 1 passive degree of freedom, ring finger 6 and little finger 7 each have 2 active degrees of freedom and 2 passive degrees of freedom, each finger is provided with 4 joints, a total of 20 joints; a drive module 14 and a control...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More